UC Berkeley AI (BAIR) Lab: LEGO

Latest Updates
- Accepted at International Conference on Learning Representations (ICLR) 2026
Overview
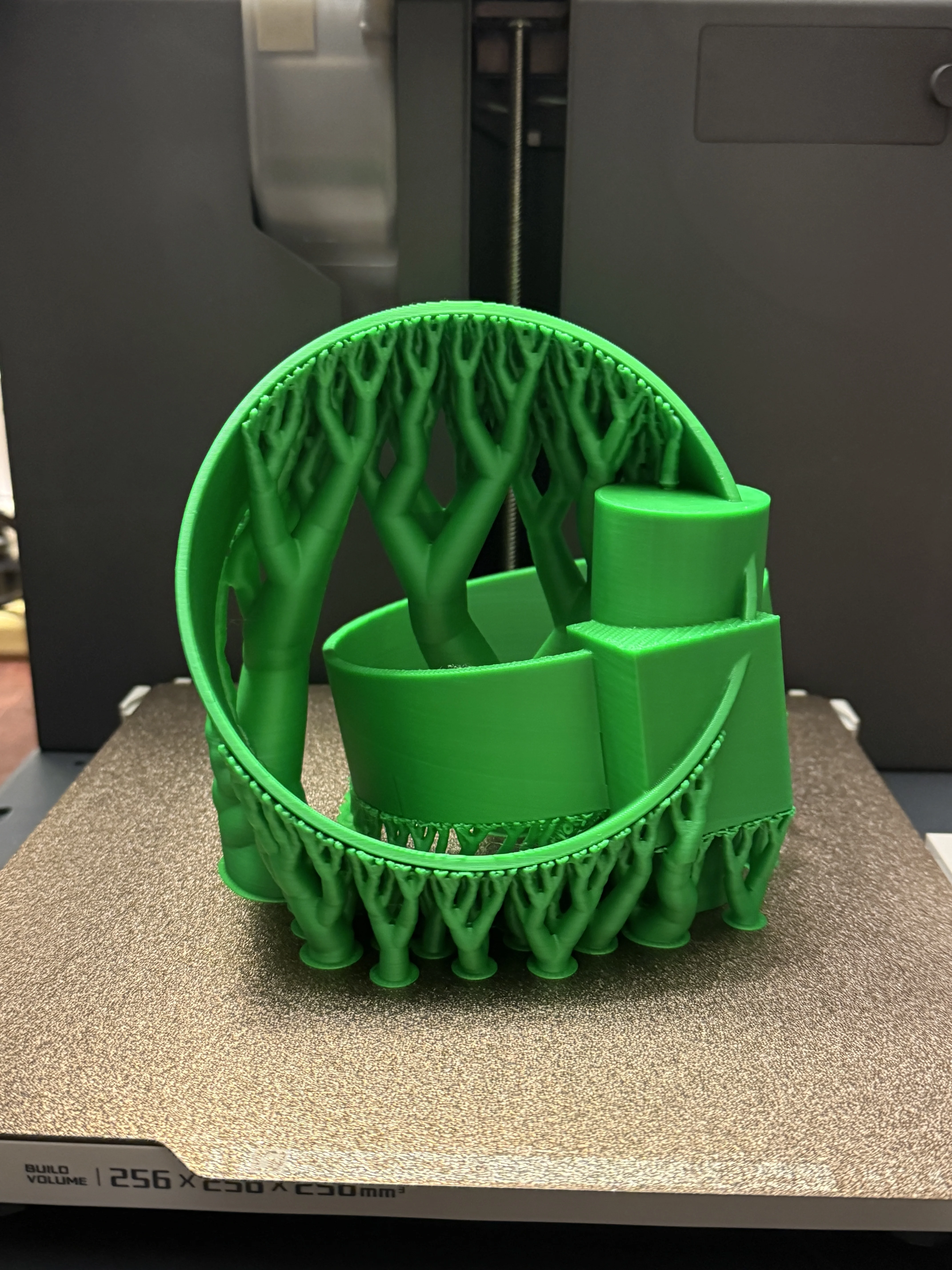
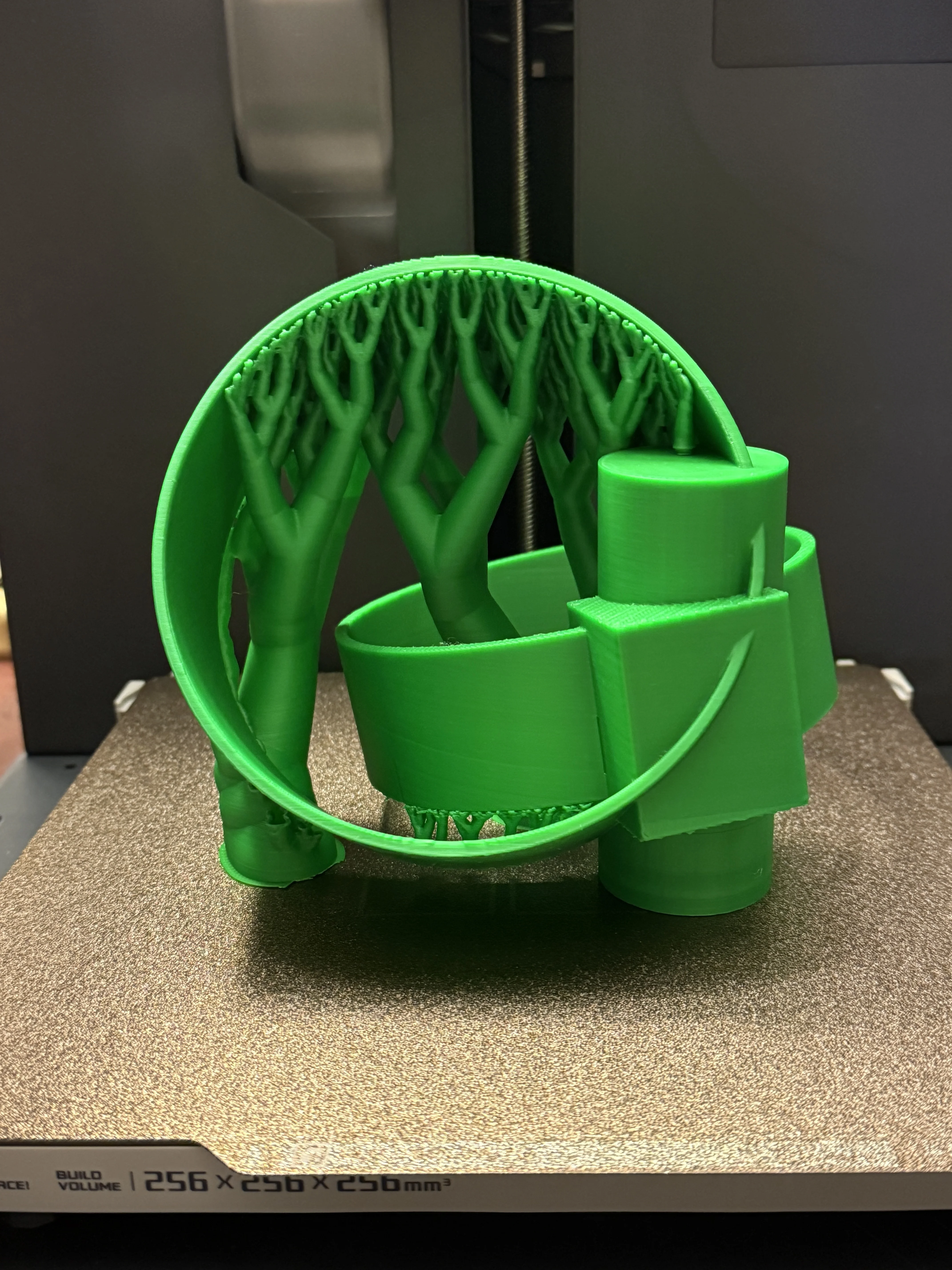
I first visited the UC Berkeley AI Lab (BAIR) during the spring of my Junior year and was very impressed by the robots and research there. Later that year, I worked with BAIR to 3D-print 250+ custom “toys” for a generalizable grasping study, outperforming commercial vendor lead times to meet critical deadlines.
I utilized the extensive 3D printing experience gained from FTC to set up a print farm to print 278 toys in less than 2 months. All parts were printed out of PLA. You can check out the research paper which was recently accepted at the ICLR 2026 conference and more information here.




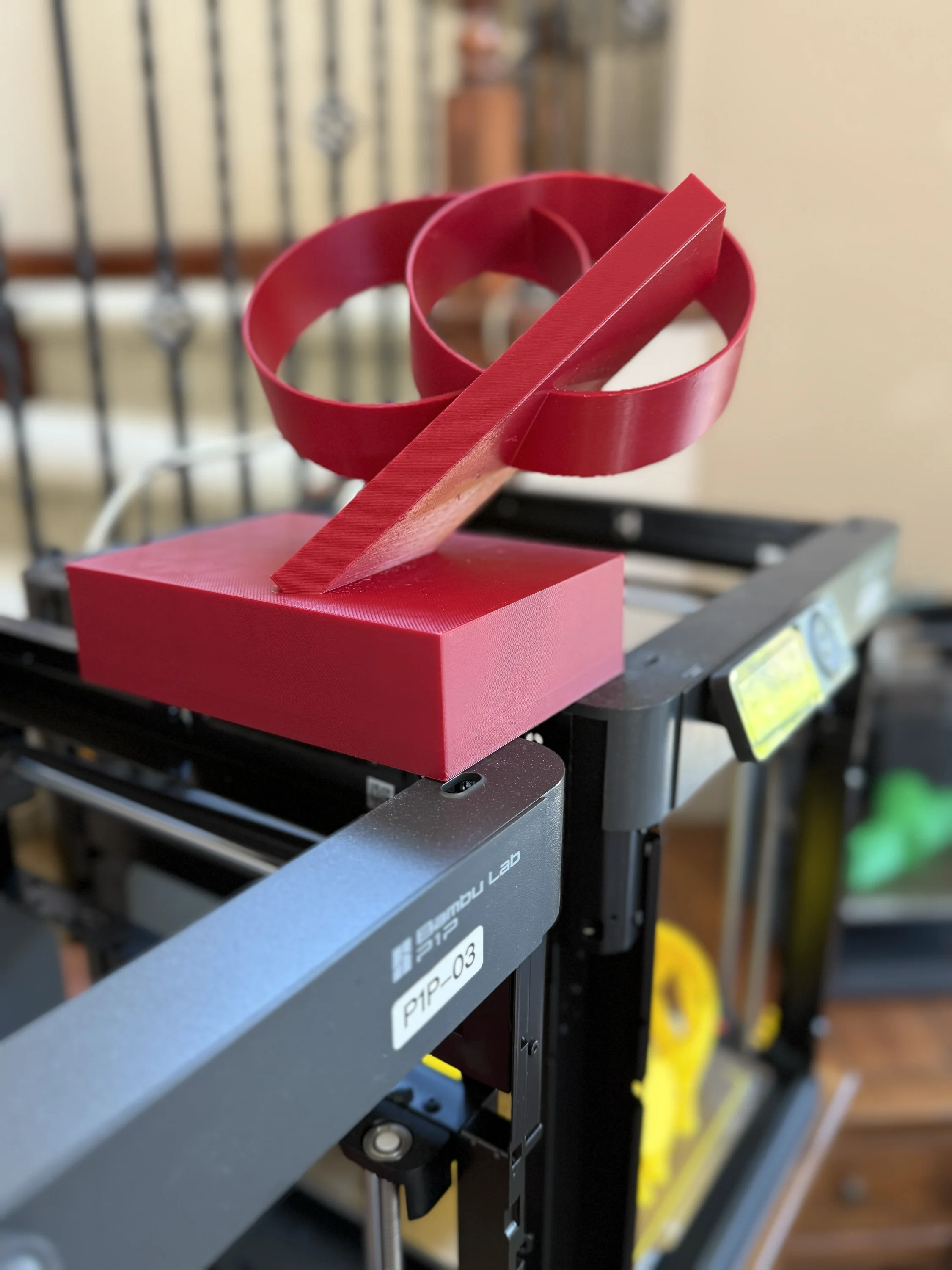



Swipe or use arrow keys to view additional insert images.
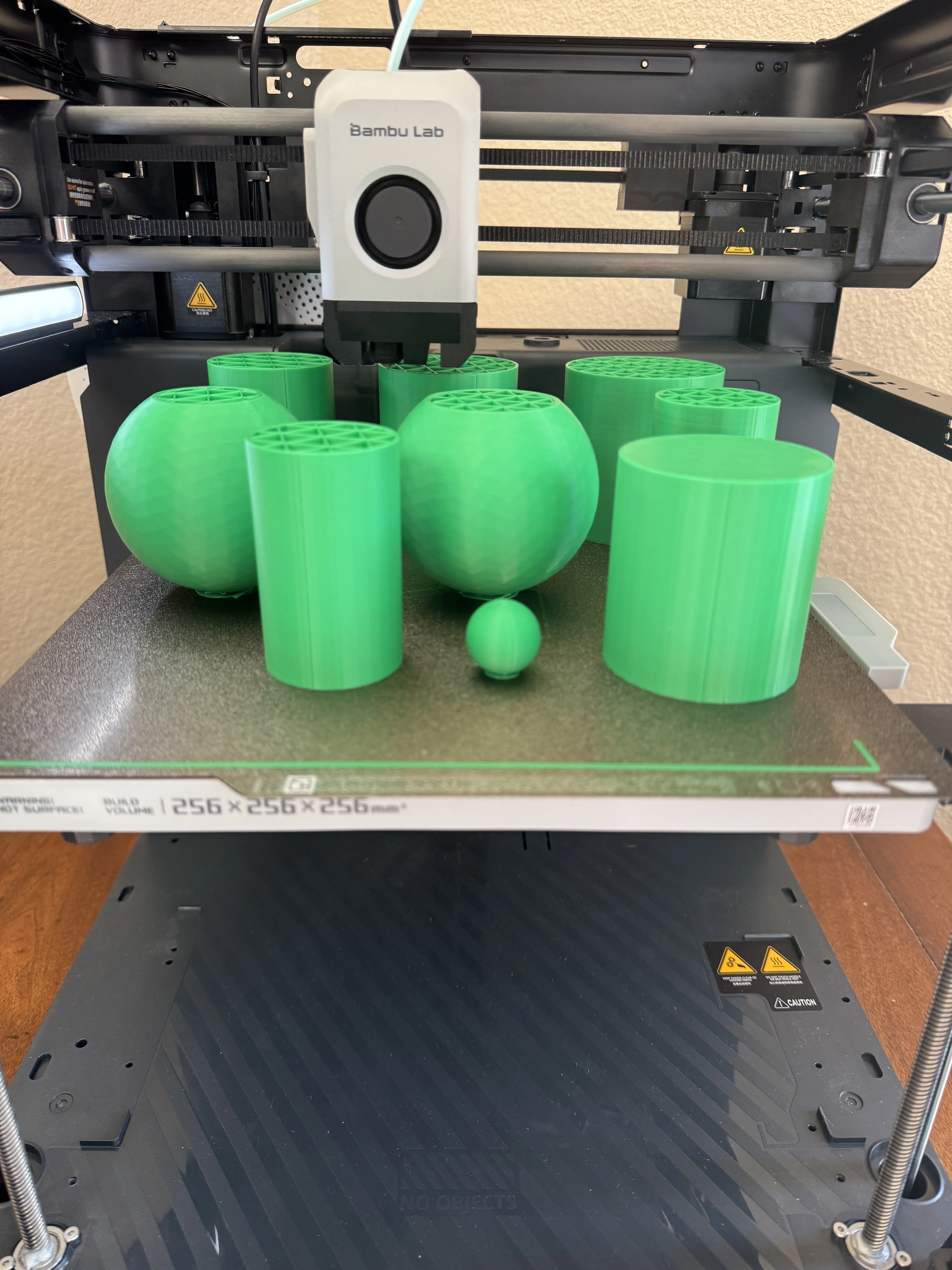
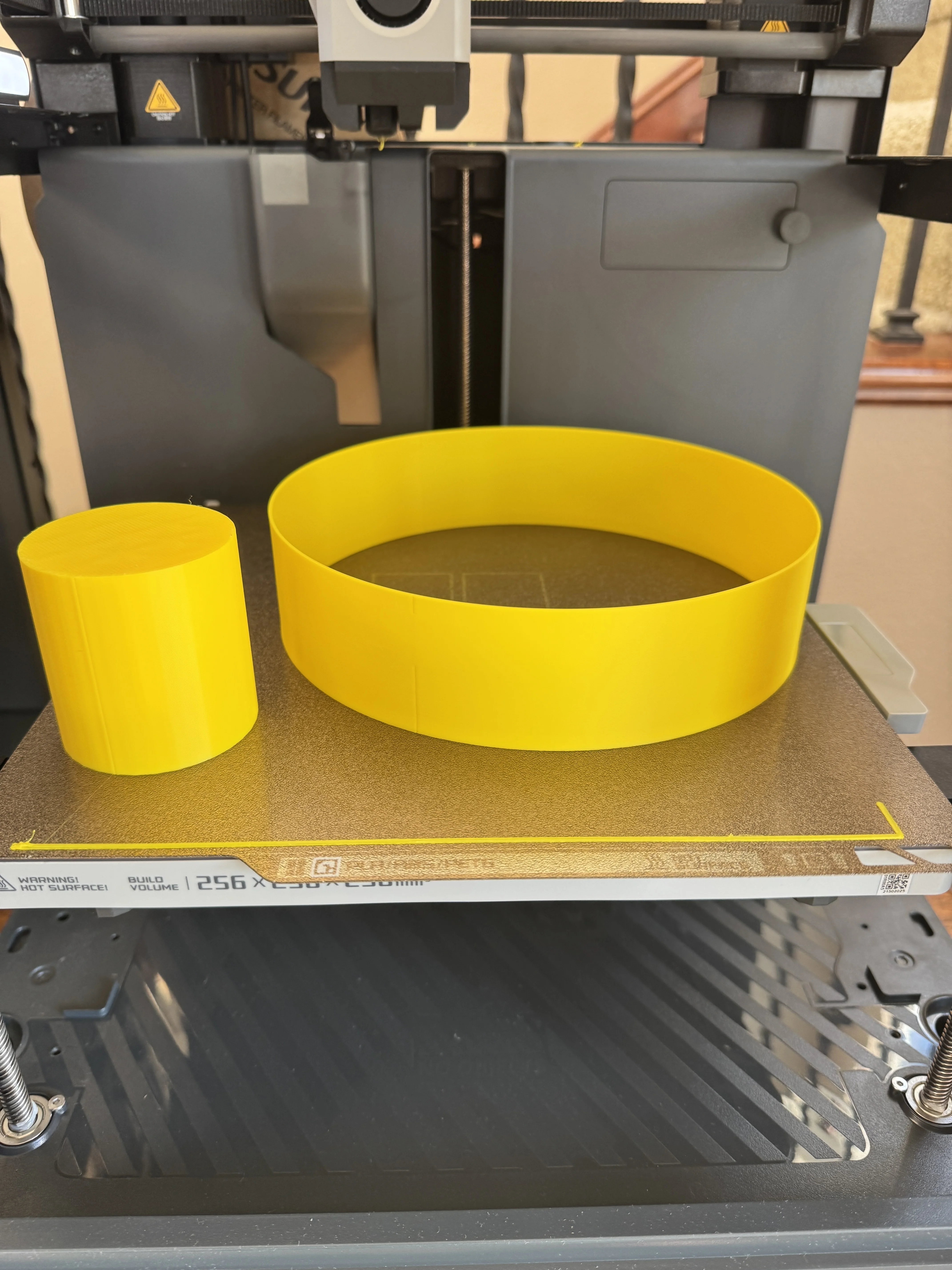
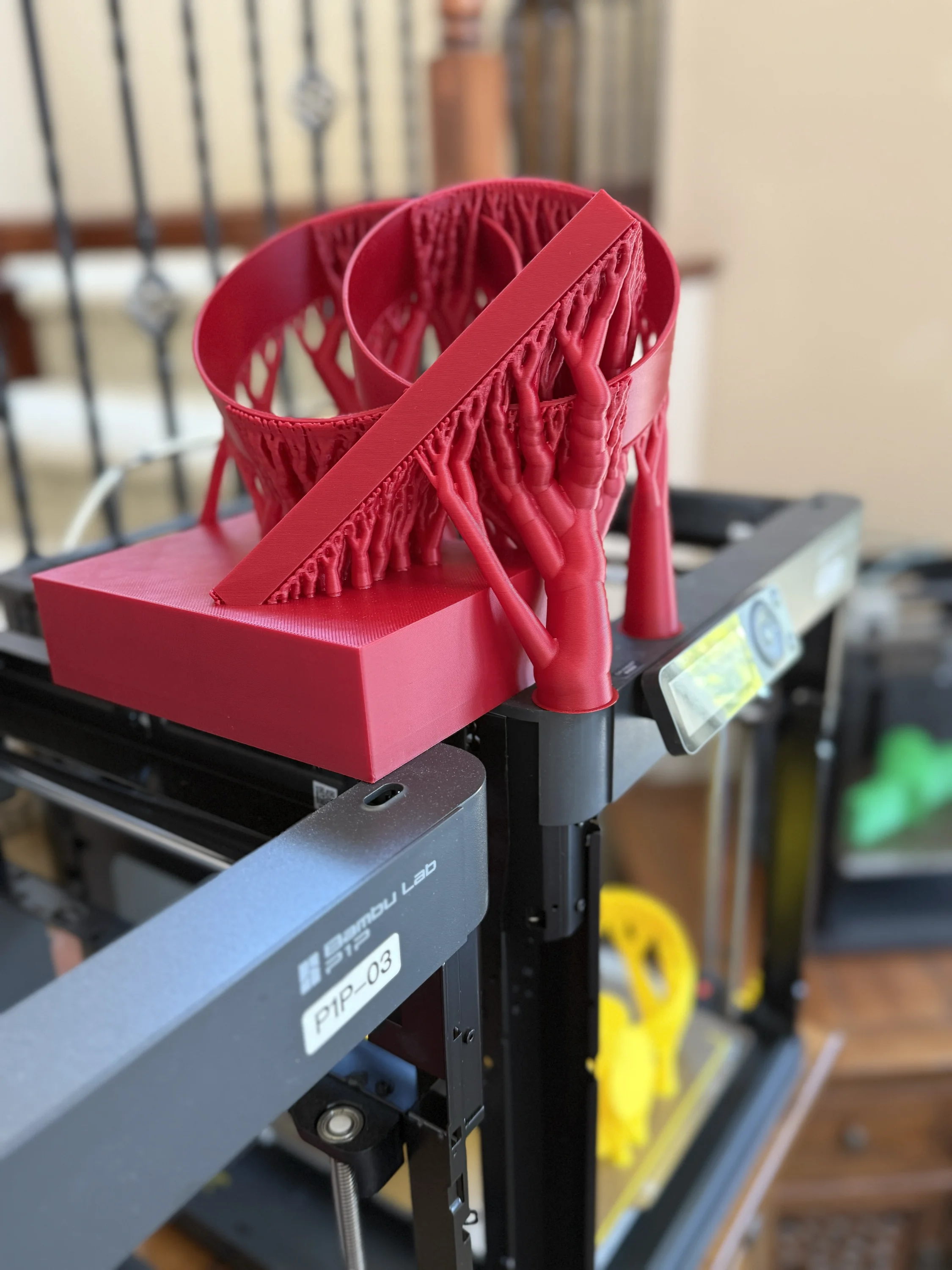
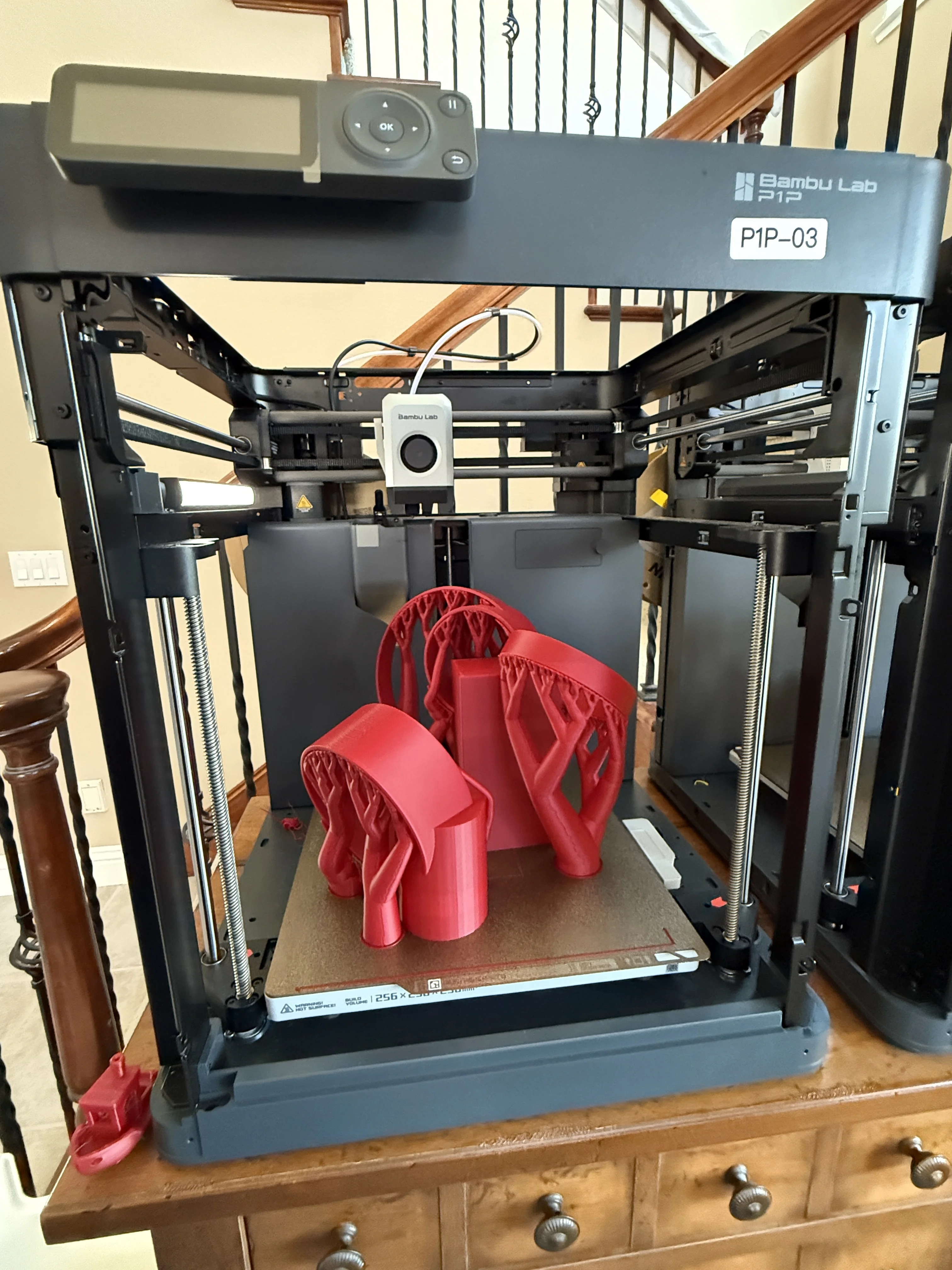
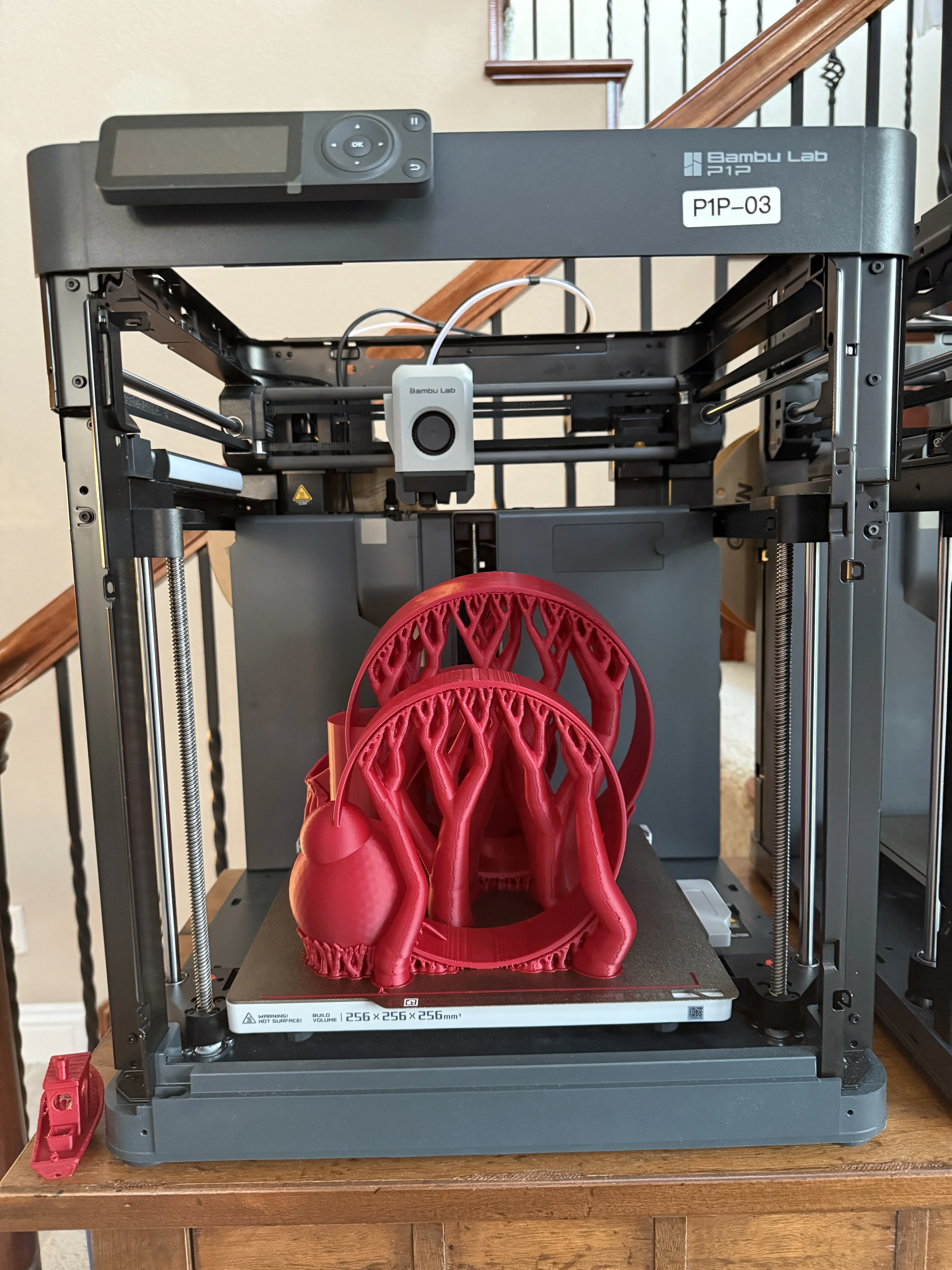
Print Farm
The print farm was comprised of 8 Bambu Lab P1Ps and 1 X1C. All printers had their default 0.4mm nozzles swapped out for 0.6mm nozzles for faster printing speeds. I managed all printers through Bambu Studio and transferred all the sliced files to the Bambu Farm Manager to run them all 24/7. All 278 toys were kept track of and assigned a color on this centralized spreadsheet.

Bambu Farm Manager
Unitree H1-2 Camera Mount
In addition to printing the toys, I designed and printed a PLA+ clamping mount for a Zed 2i Stereo Camera to be mounted on the H1-2 robot’s head.
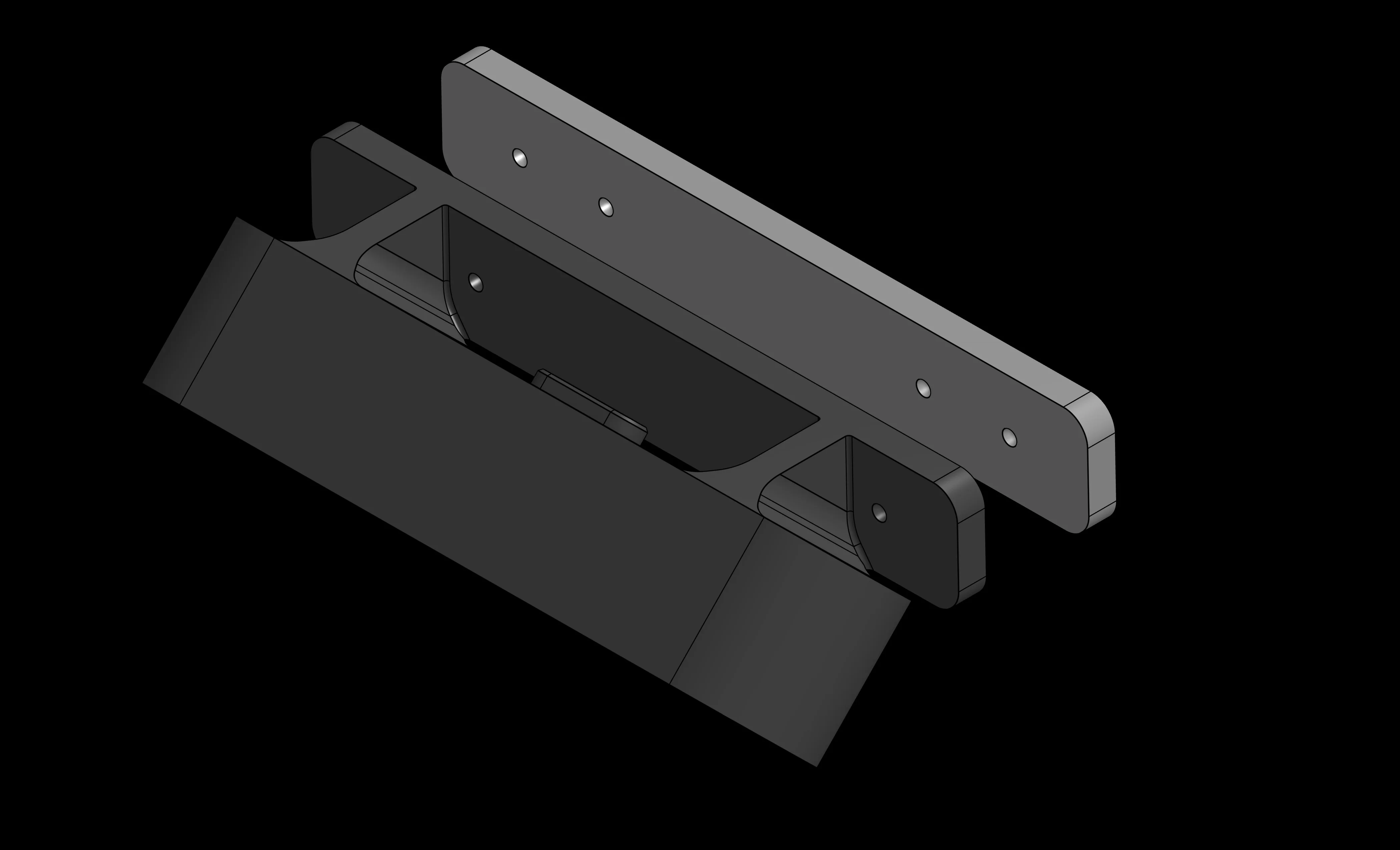
CAD of mount
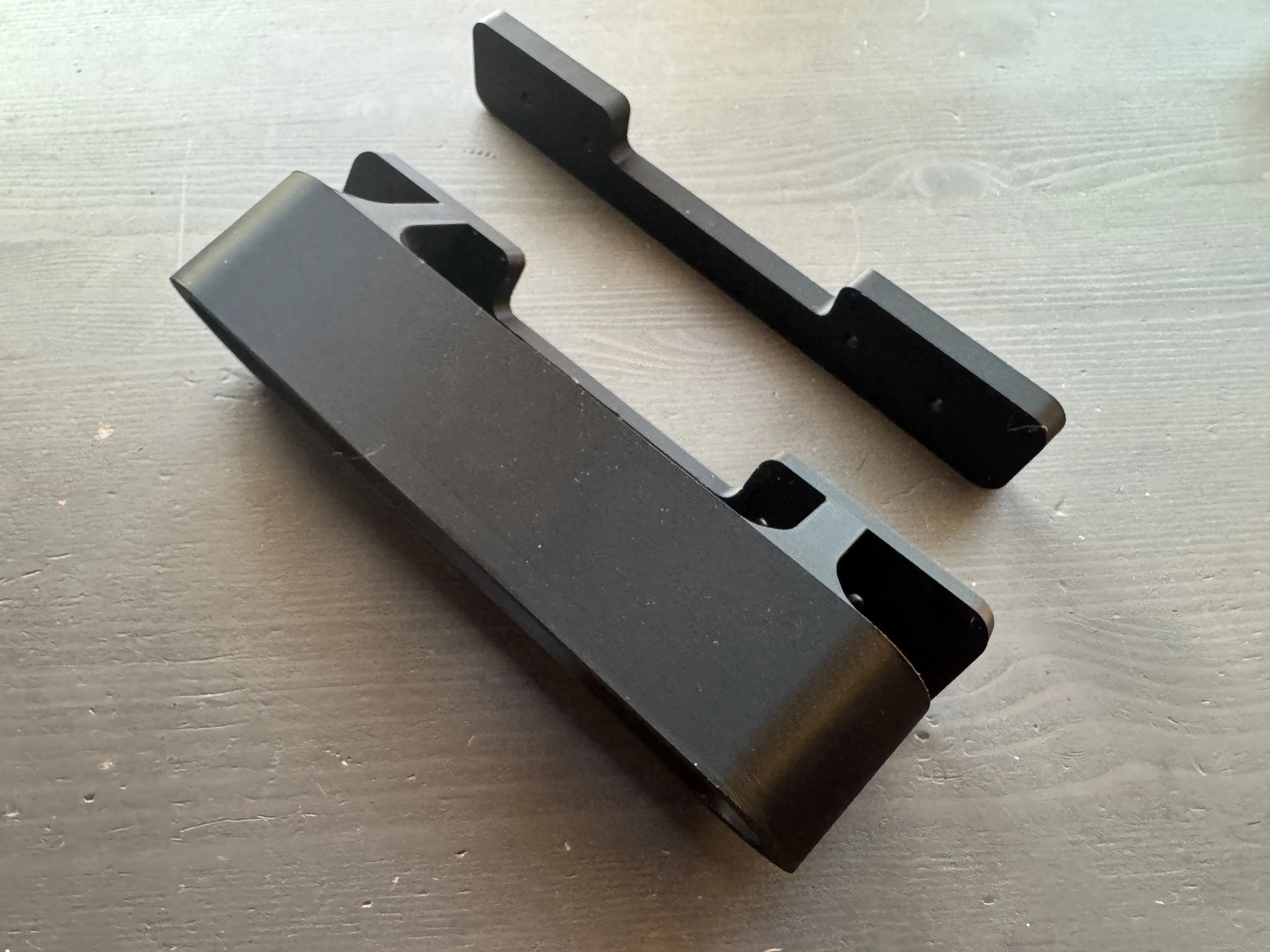
Printed (PLA+)

Mounted on neck of Unitree H1-2
How the Toys Were Used
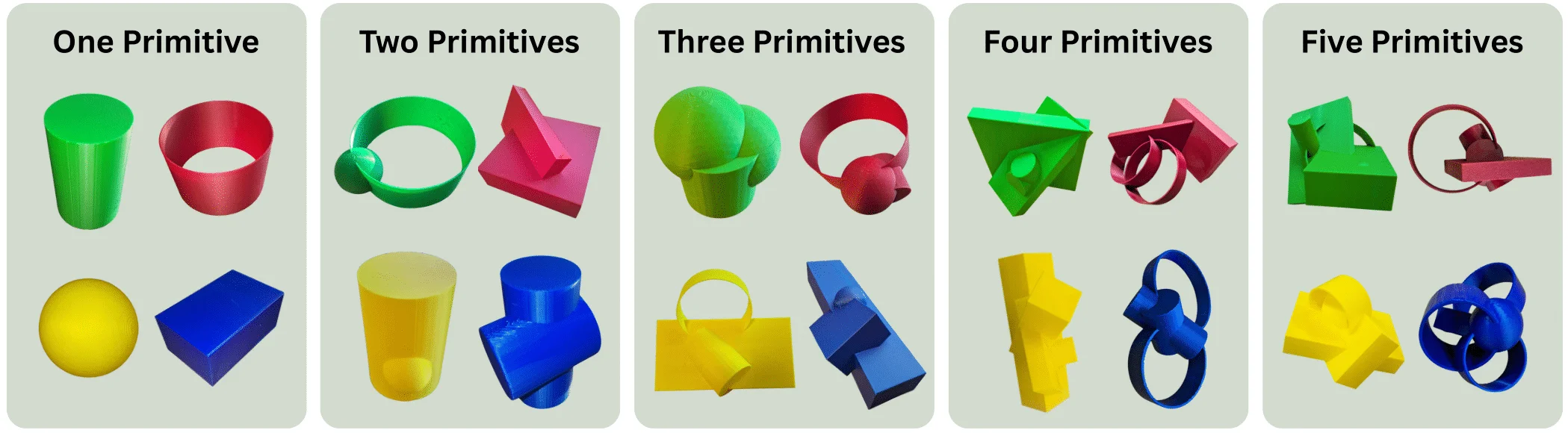
Toys in Action!
*All images and videos featured in the How the Toys Were Used and Toys in Action! sections are available on the official project site here.