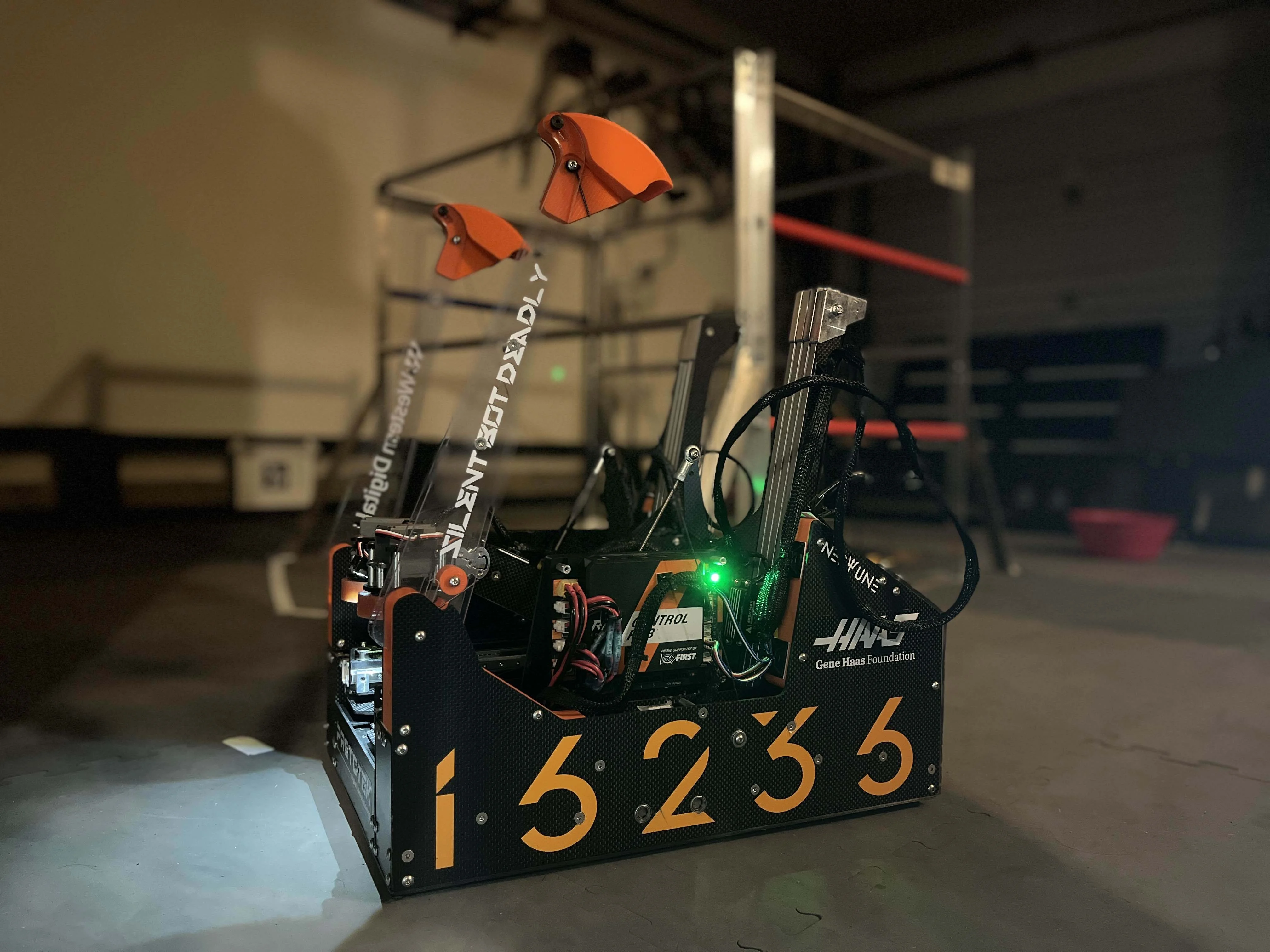
Neptune

Overview
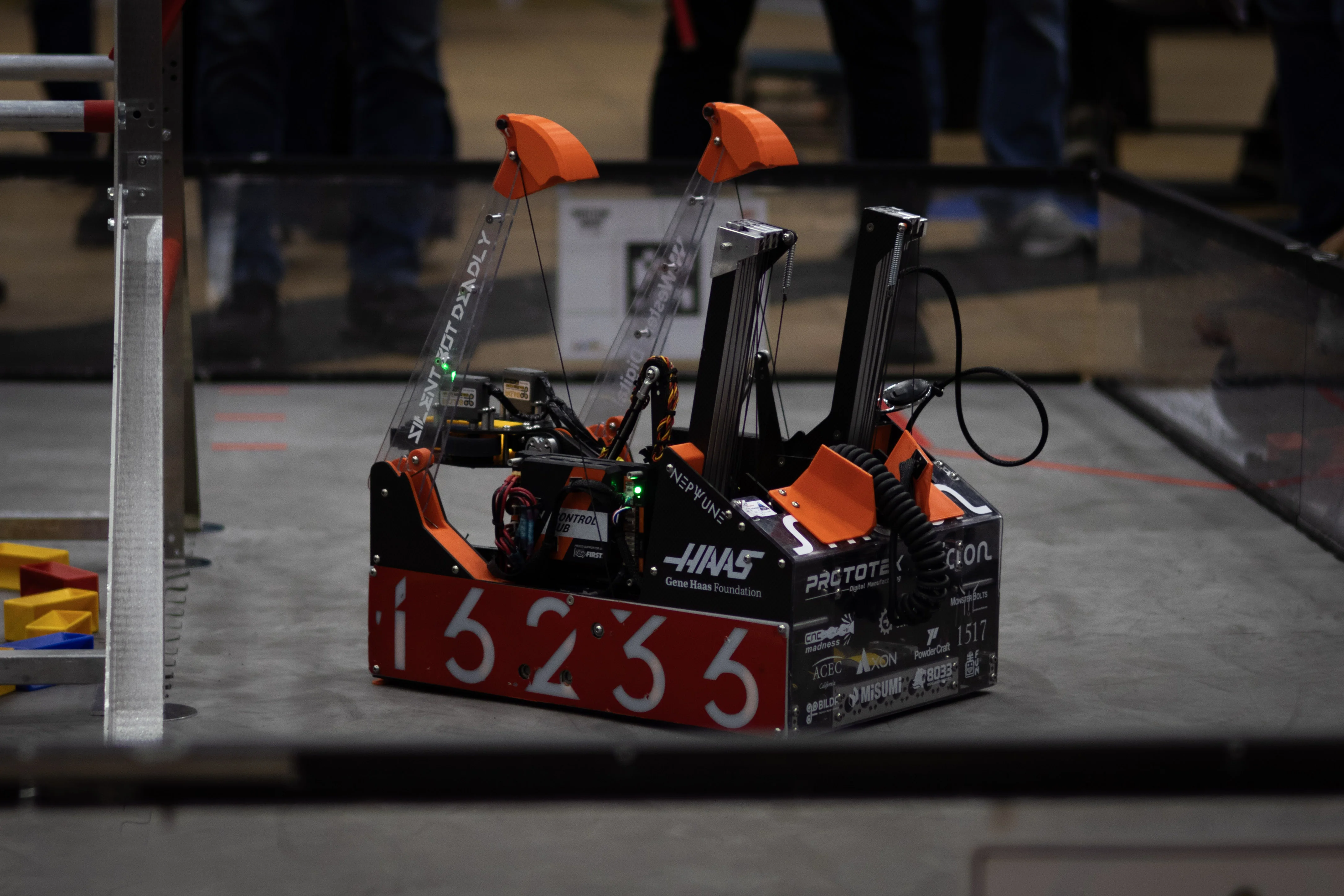
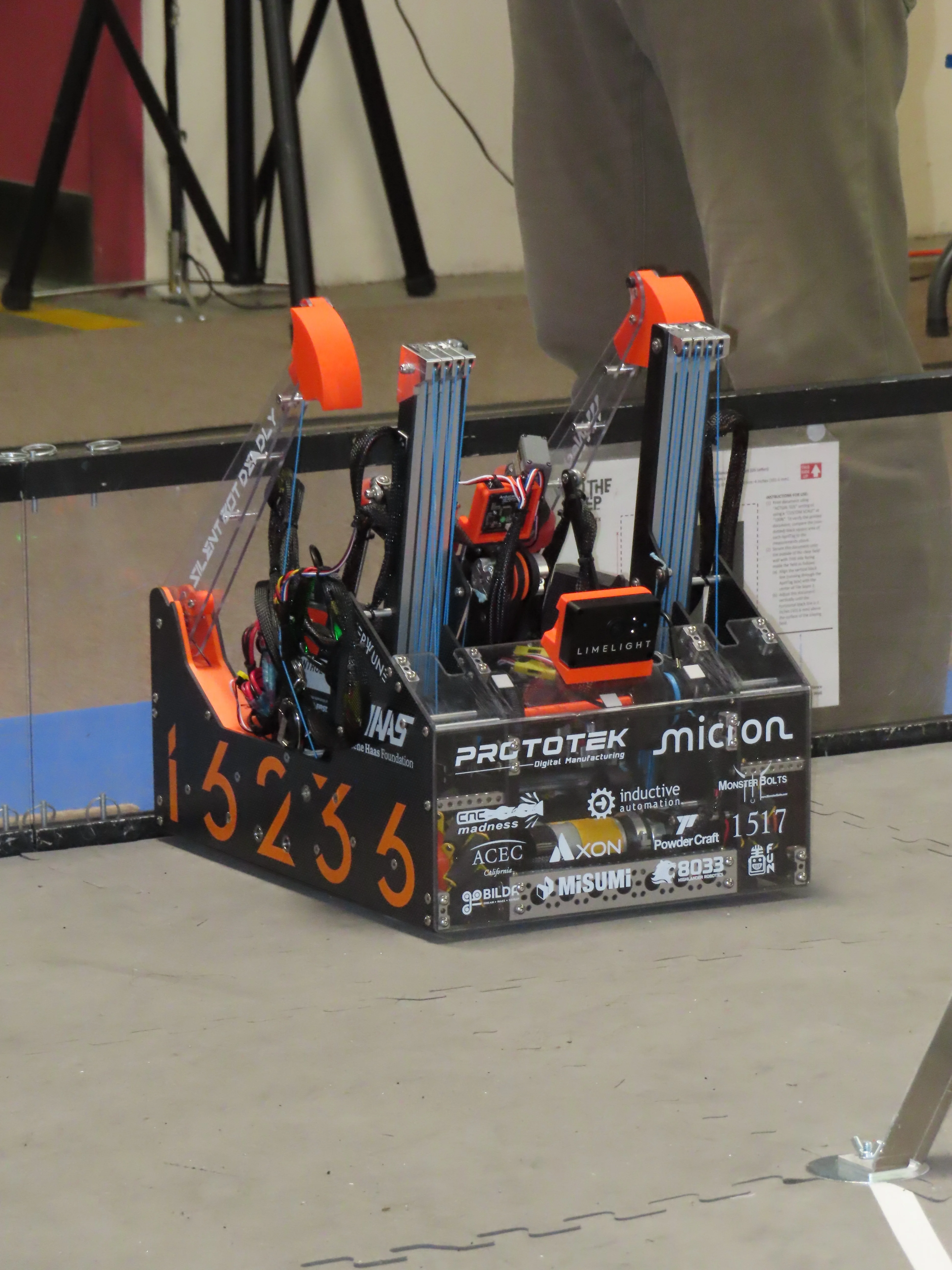
Neptune was the seventh robot I designed and assembled on Team Juice 16236. It is the first robot to feature extremely thin (1.5mm) billet aluminum linear slide inserts, a design that delivered a major reduction in weight and a simultaneous increase in overall rigidity.
Neptune was driven by three core design goals:
- Minimizing Weight (prioritized using 3mm carbon fiber, billet aluminum, and pocketed 6061 aluminum)
- Modularity (Neptune is the first robot for Team Juice 16236 to avoid a “revolutionary” mid-season rebuild)
- Simplicity (one of the only robots that season to eliminate the need for a transfer system)
Neptune led Team Juice 16236 to strong results:
- Event Finalist Alliance at the 2025 NorCal Regional Championship
- Winning Alliance of the Gold Divison at the 2025 NorCal Regional Championship
- Quarterfinalist Alliance Captain at the highly selective 2025 Maryland Tech Invitational, which features the top 40 teams globally
6061 Billet Aluminum Inserts

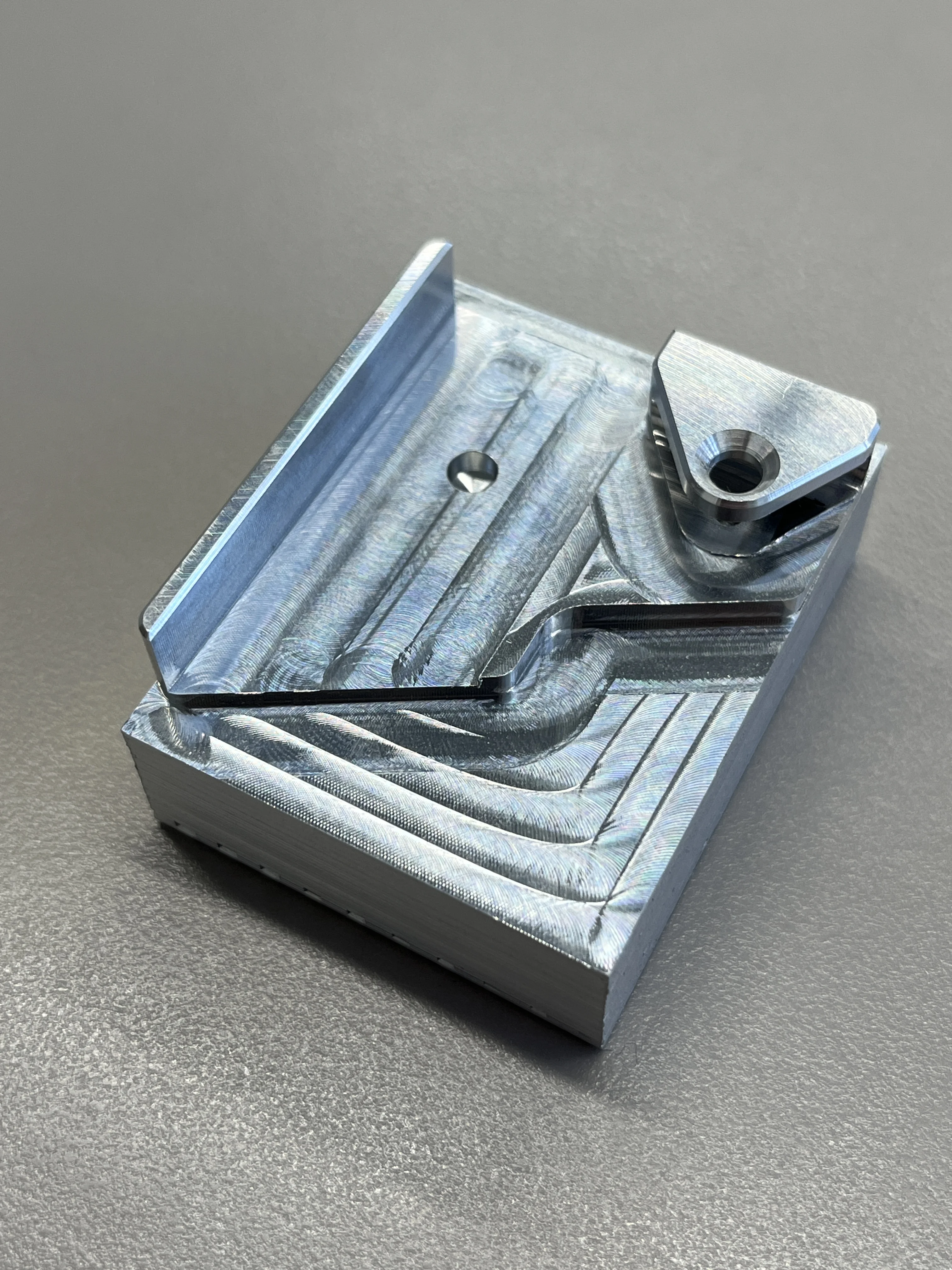
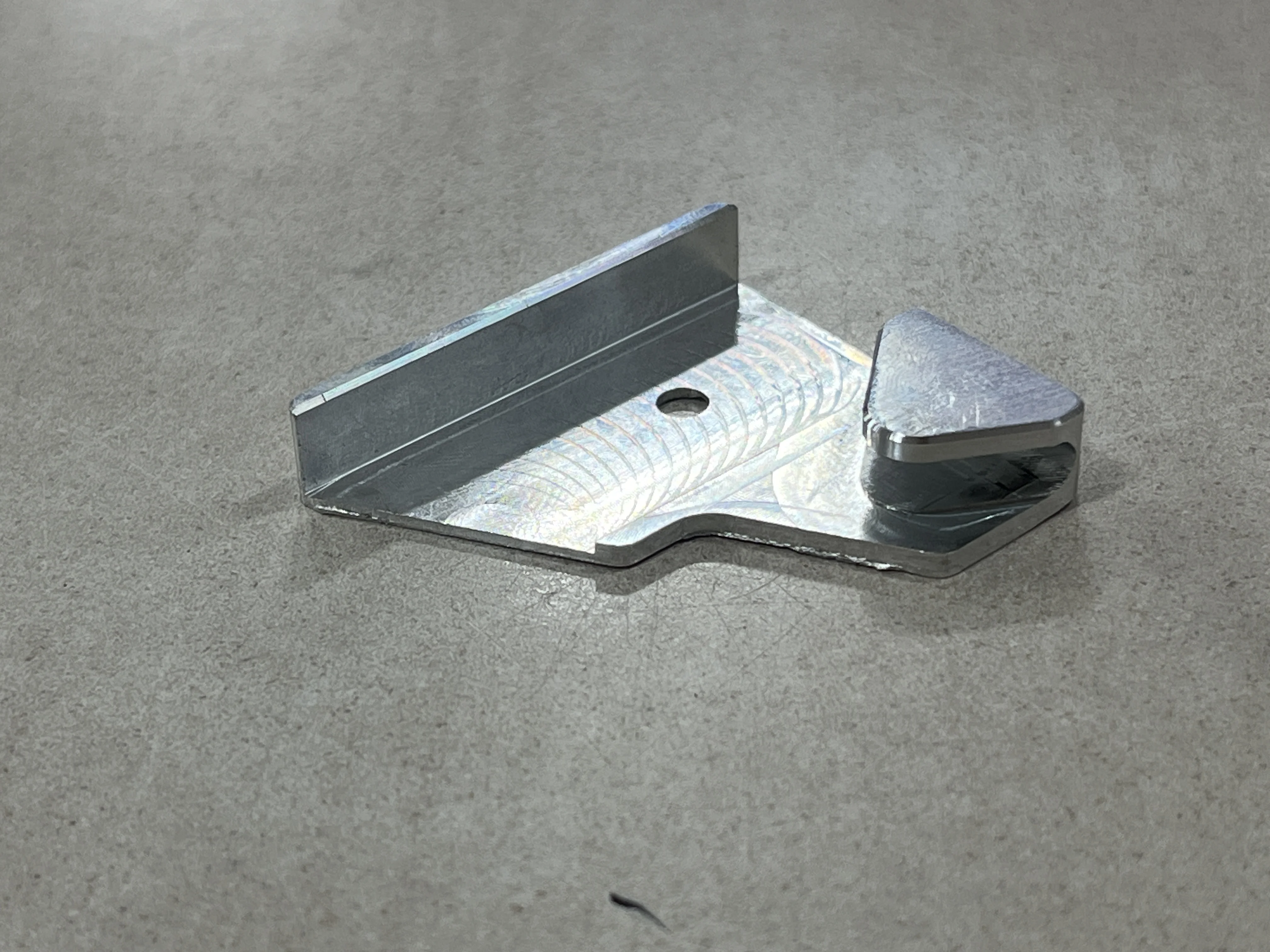
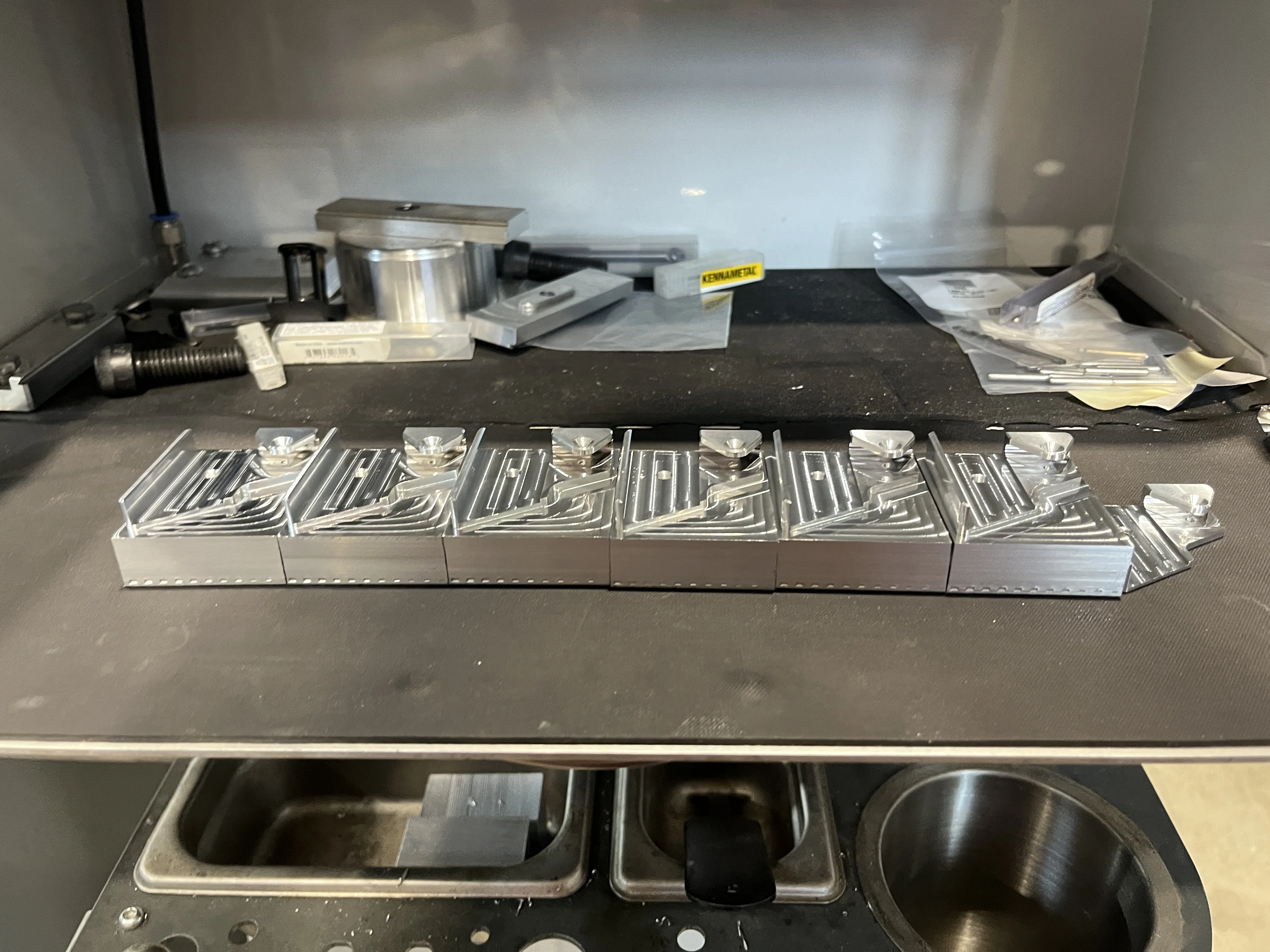

Prior to this design, linear slides typically used thicker inserts printed from PLA/PETG. By designing, machining, and implementing the 6061 billet aluminum inserts, a decrease in weight (5g per insert) was achieved, alongside a significant reduction in overall insert thickness.
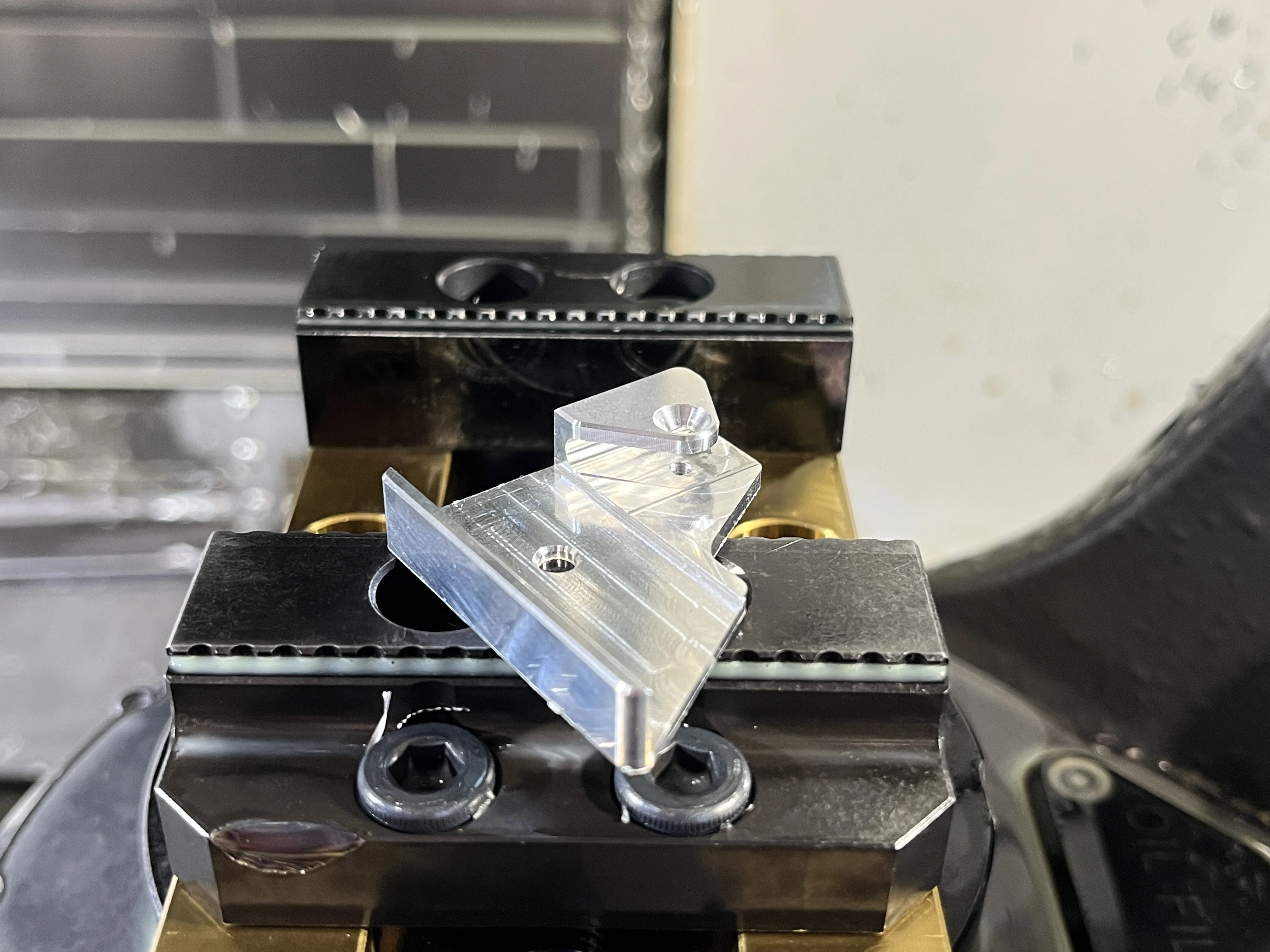
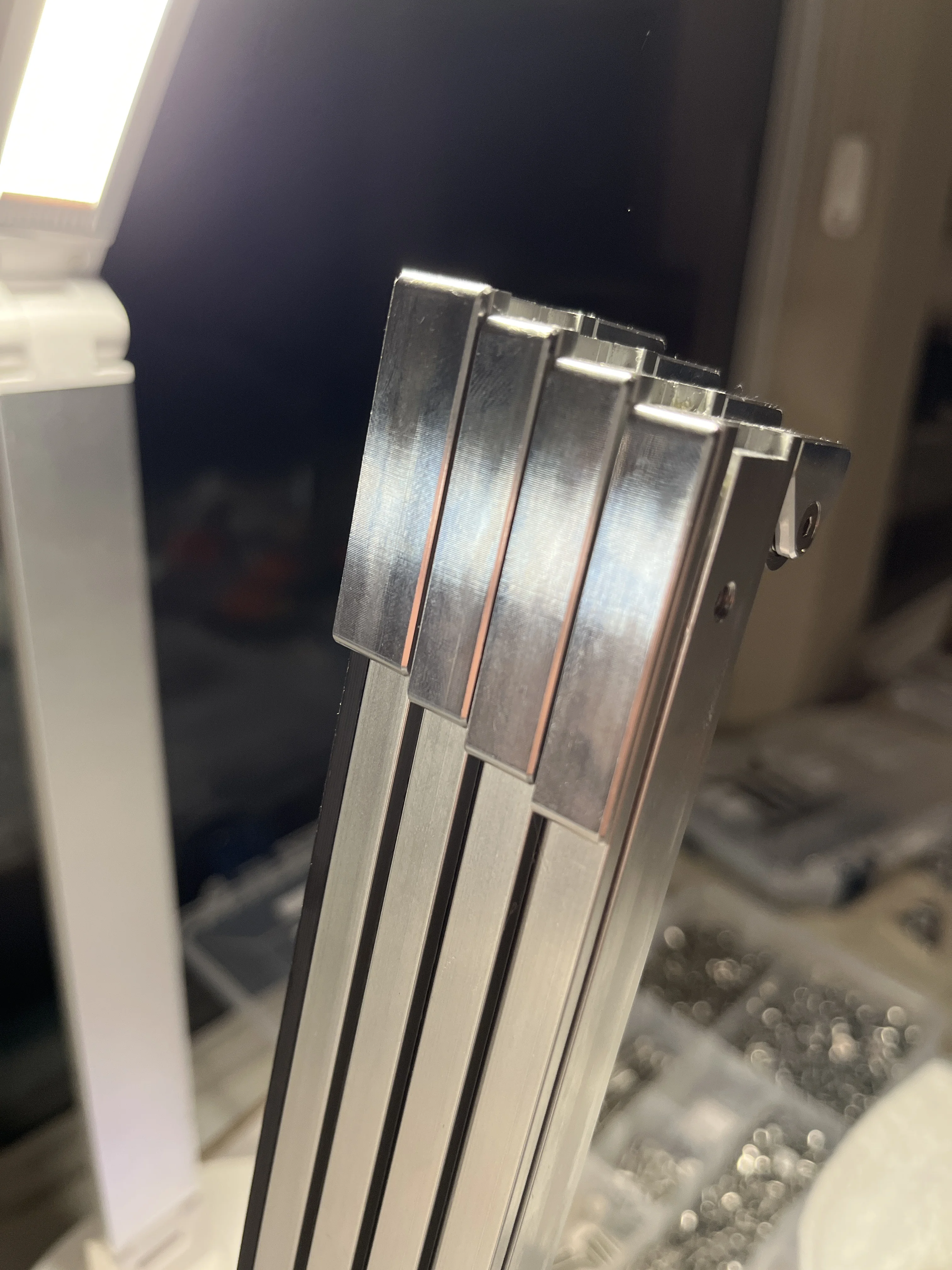
Multiple iterations were needed in order to dial in the best way of manufacturing this ultra-thin insert. This insert was difficult to manufacture due to needing the 3+2 axis to machine the slot for the pulley that the string would ride on to drive the slides.
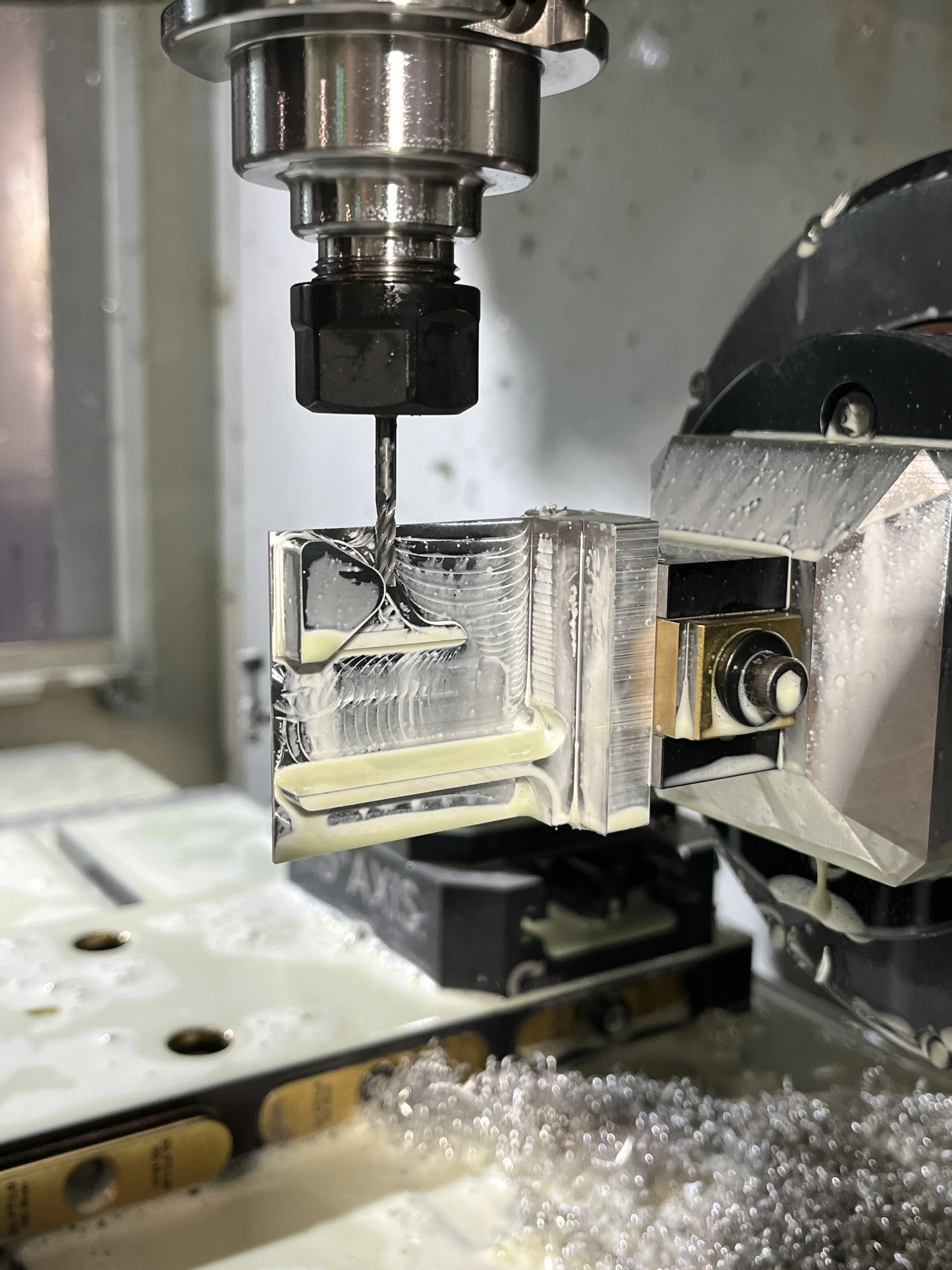
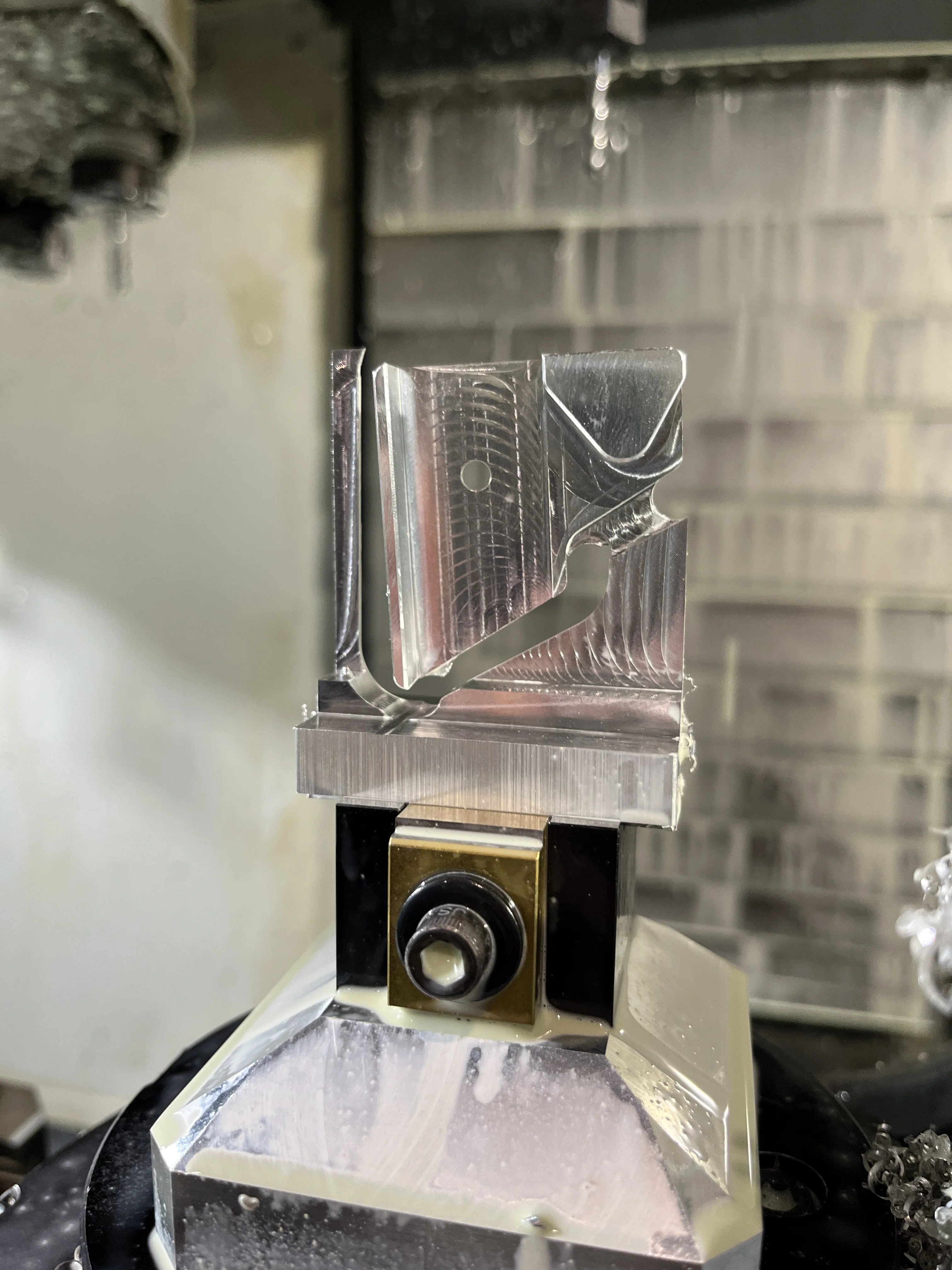
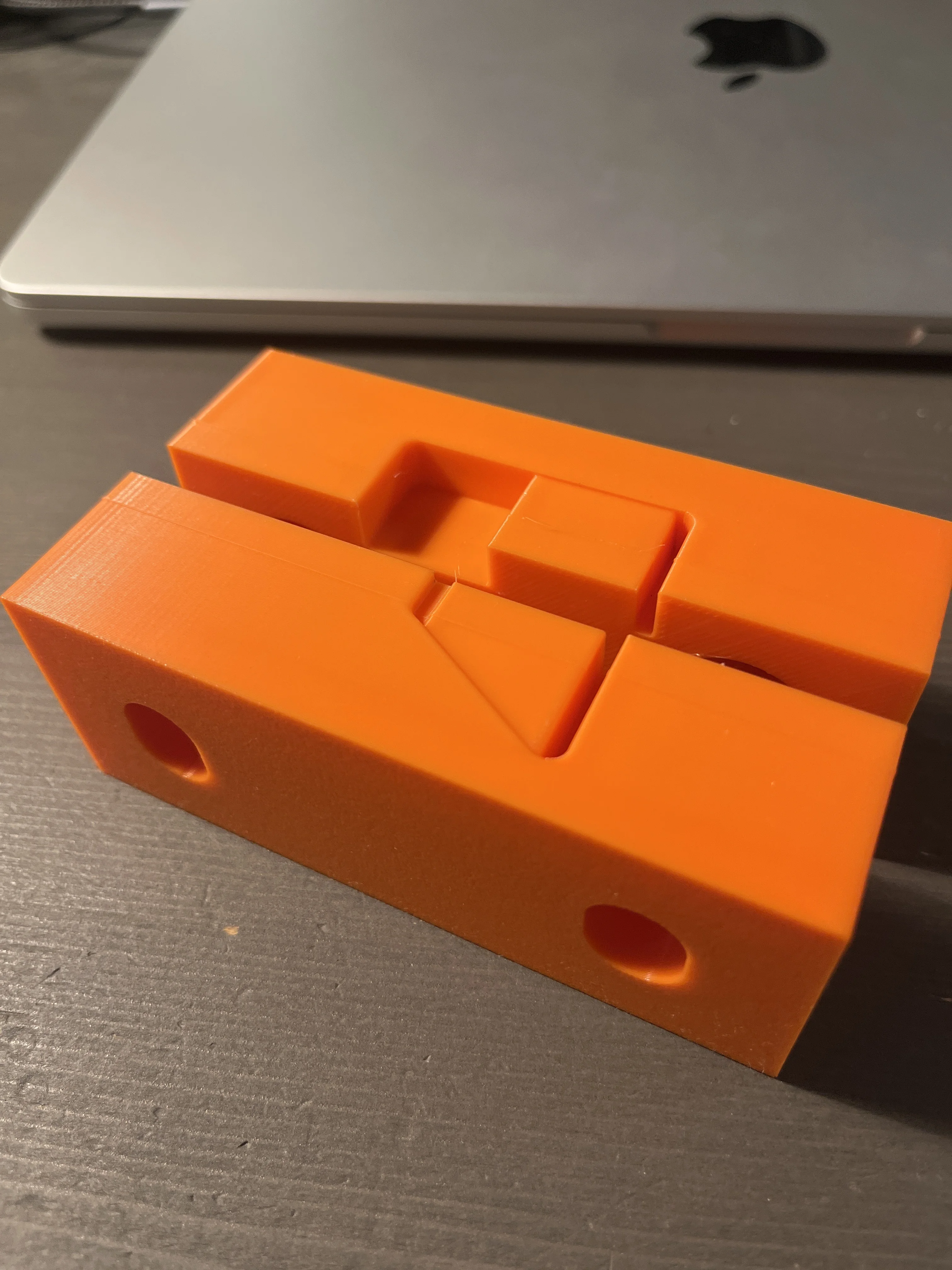
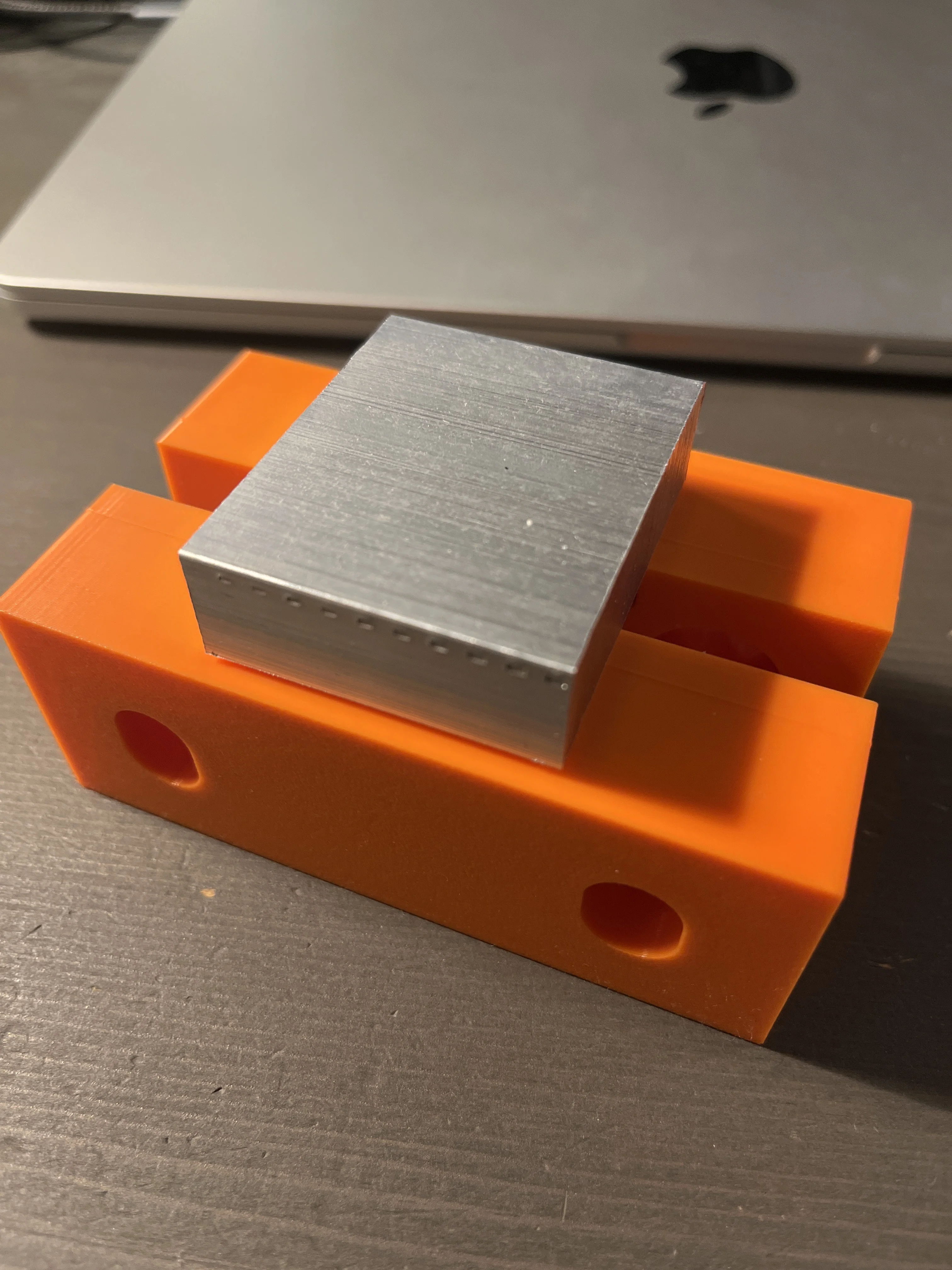
I initially started with a dovetail and tabbing the part off (2nd image); however, this introduced a large amount of harmonics into the part while machining, making the necessary tolerances unachievable. I then went with a traditional setup, but had to offset the part to the very edge of the vise when machining to avoid collisions.
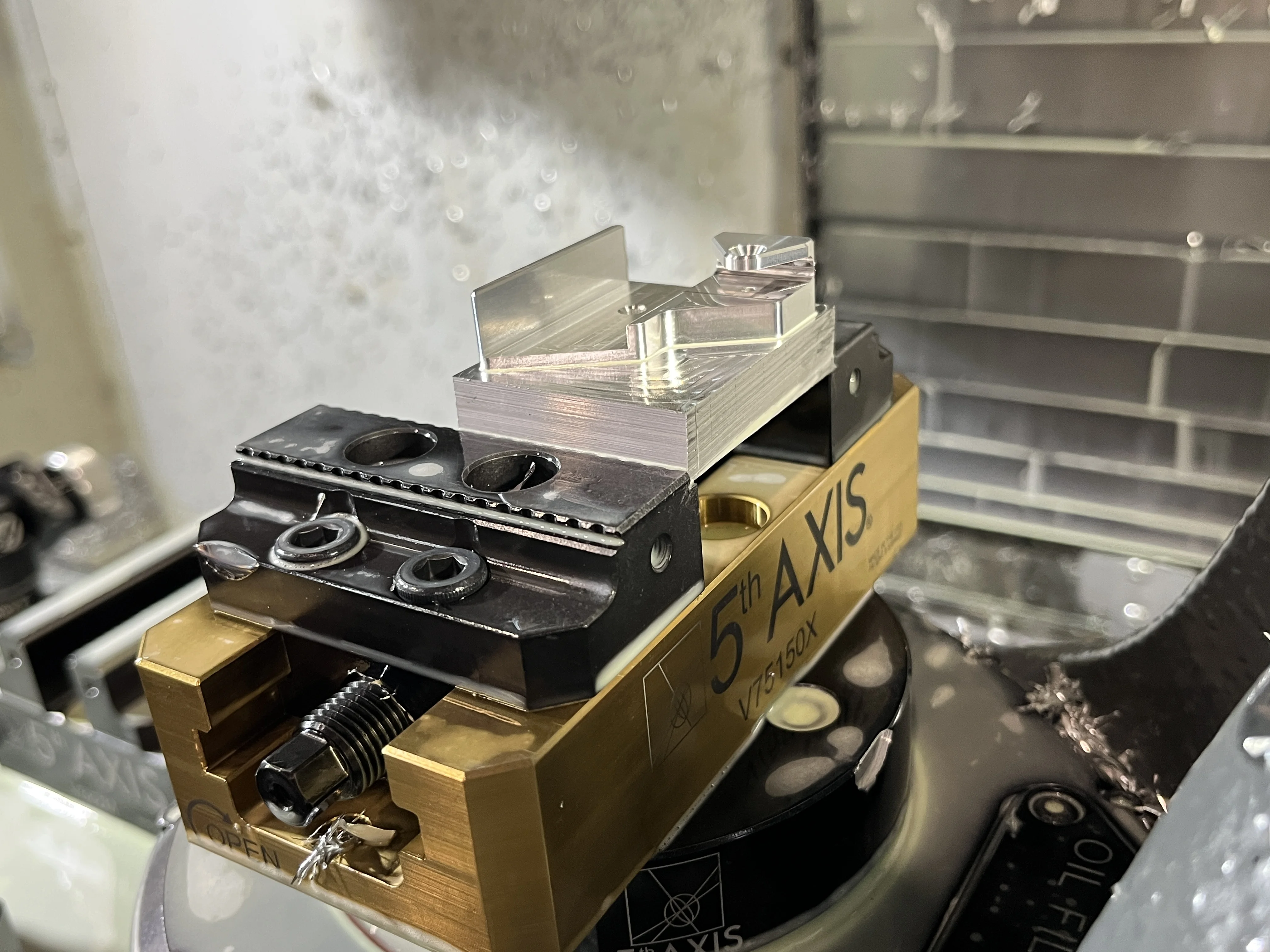
I machined a total of 15 inserts by utilizing a two-operation workflow. The first operation was done on a 3+2 axis Haas VF-2. The part was then transferred to a 3-axis Haas Mini Mill for the second operation using custom 3D-printed soft jaws. I was able to run both machines simultaneously with the automated probing macro I developed, cutting down on overall cycle times by up to 20%.
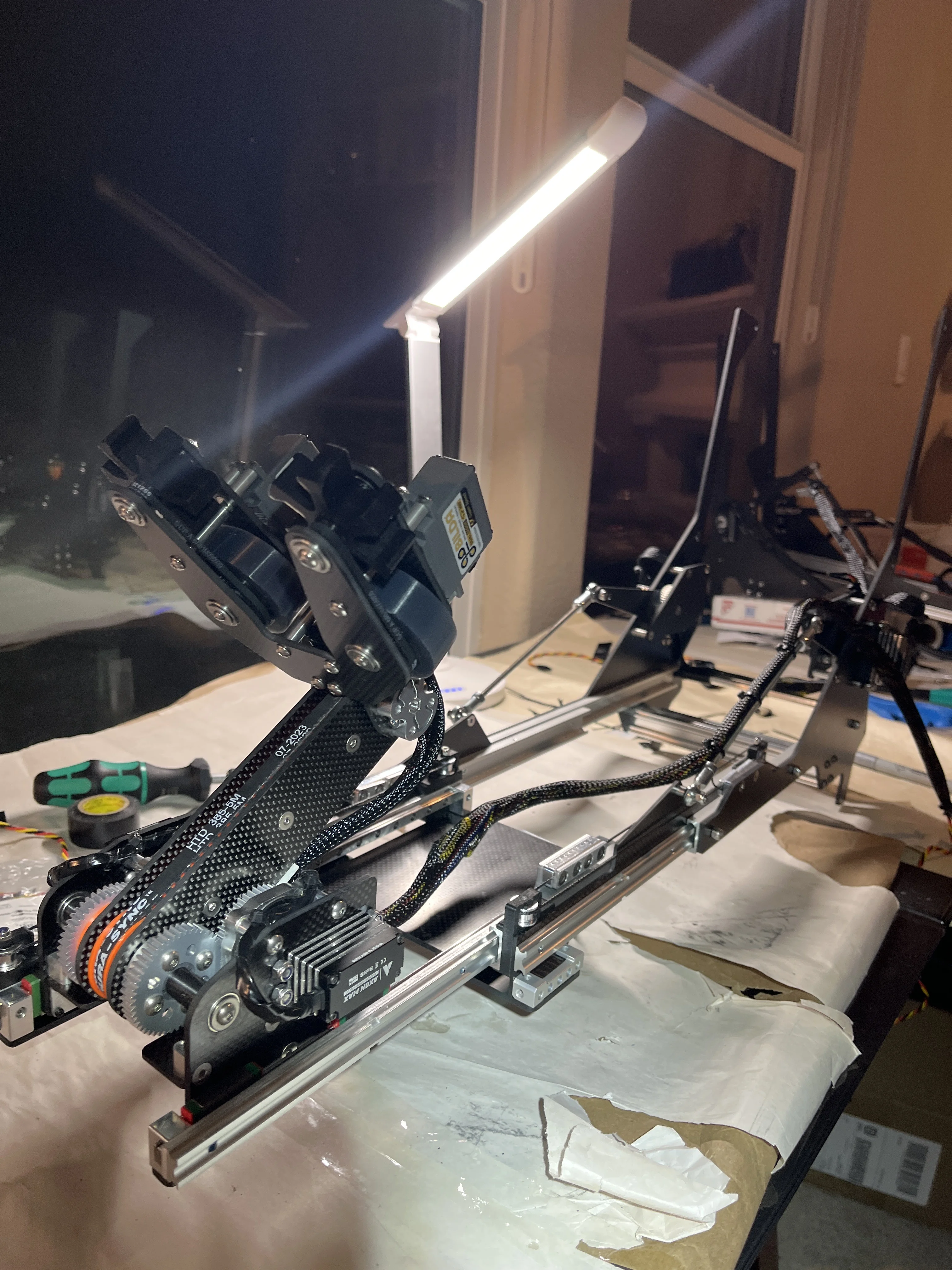
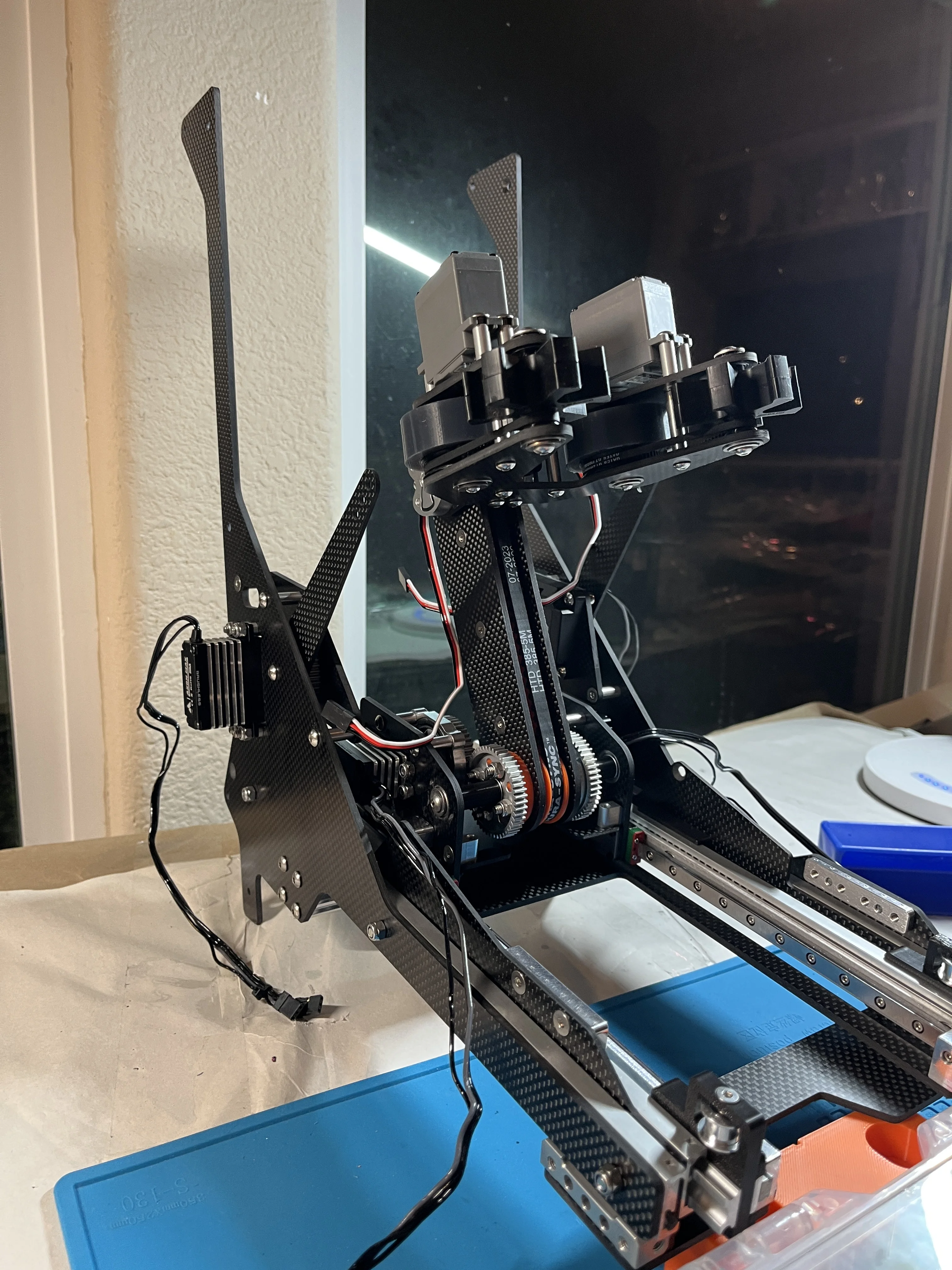
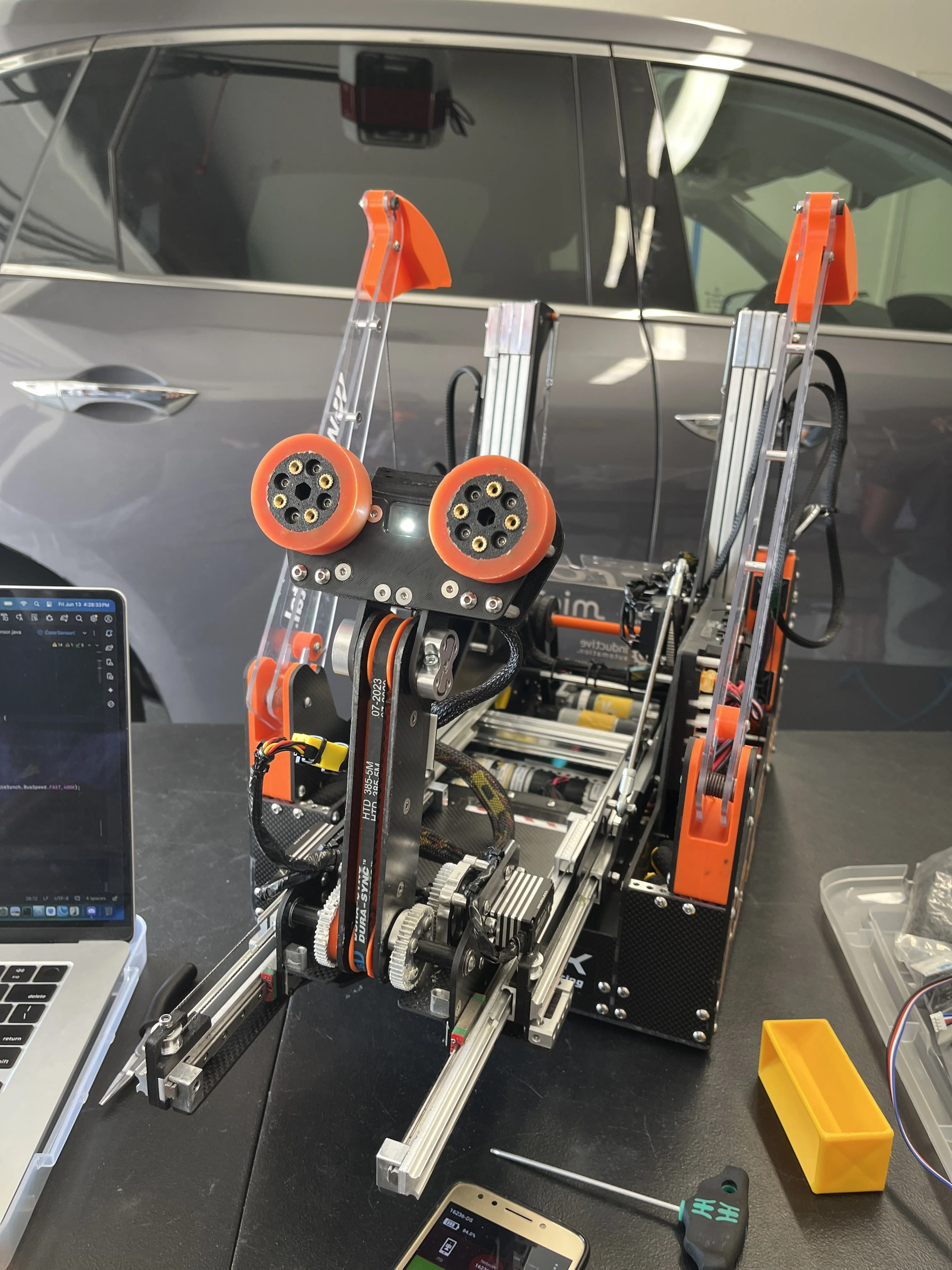
Horizontal Extension
Version 2 (left) vs. Version 1 (right)

Version 2 (left) vs. Version 1 (right)
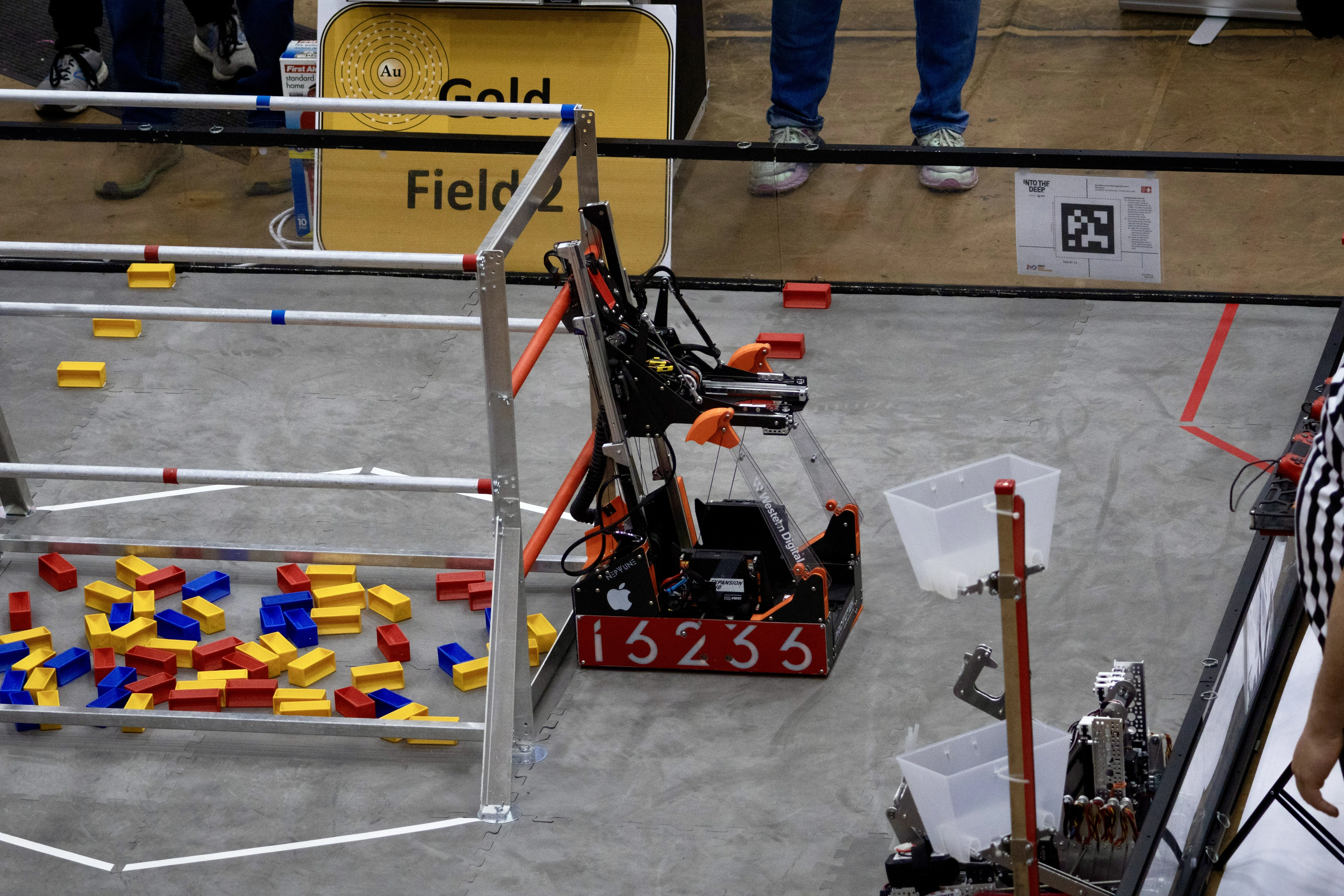
Eliminating the need for a transfer system was a key driver behind Neptune’s design. Typically, robots that season utilized a separate, statically mounted intake extension that would hand off the samples (rectangular game pieces) to the vertical extension in order to score. This common approach introduced complexities and points of failure that required continuous tuning and, more often than not, resulted in slower cycle times. I chose to avoid the risks and unnecessary complexity when designing Neptune, focusing on simplicity and reliability.
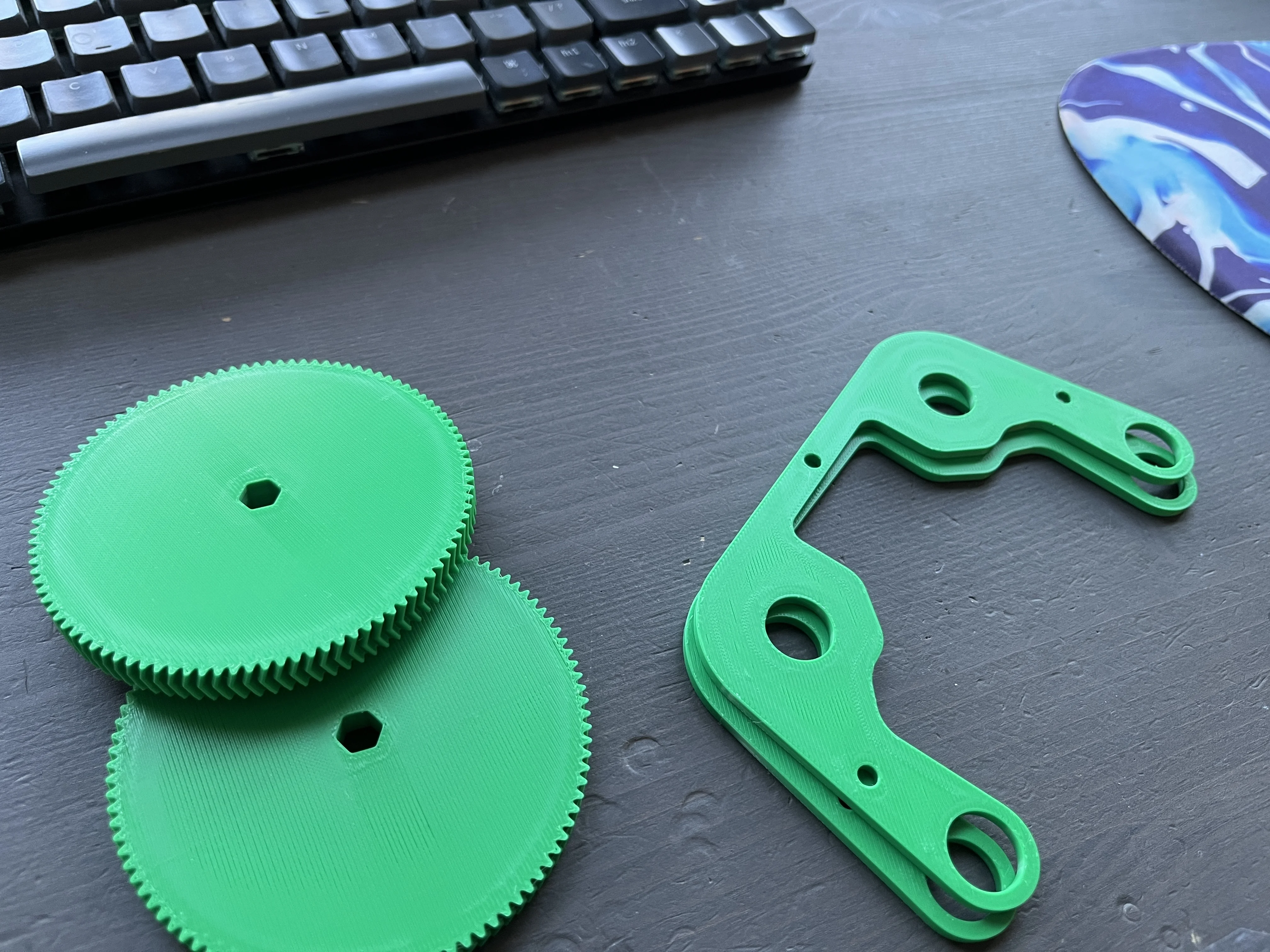
However, fitting nearly 2 feet of horizontal extension onto the vertical subsystem proved to be a major challenge. Not only was weight a major concern, but compact packaging of the entire subsystem was extremely difficult. This complexity ultimately led to the implementation of a linkage cascade system (diagram below).
The base stage of the horizontal extension was driven by a servo geared down for torque (gearing was the major change that led to the speed improvement between version 1 and 2), and every next stage would be rigged cascade, so that when the first stage was driven, all the stages would extend. With the new 3.2:1 ratio, version 2 extended at nearly 3x the speed of version 1.
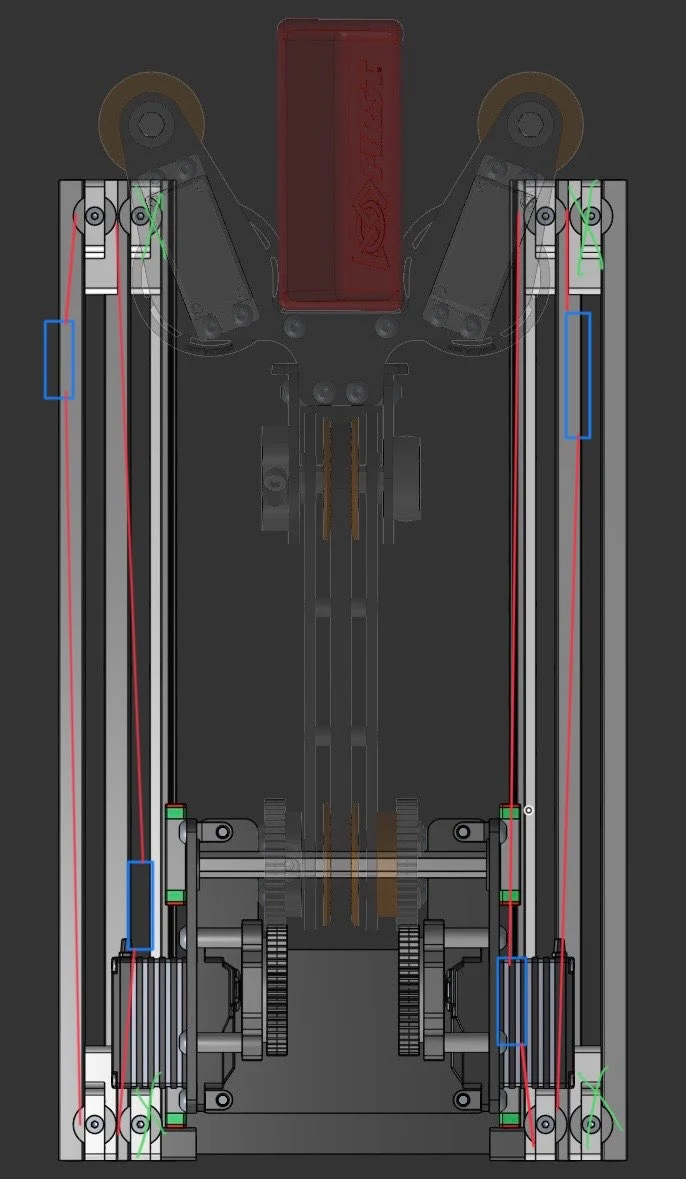
Linkage cascade string rigging path



Swipe or use arrow keys to view additional insert images.
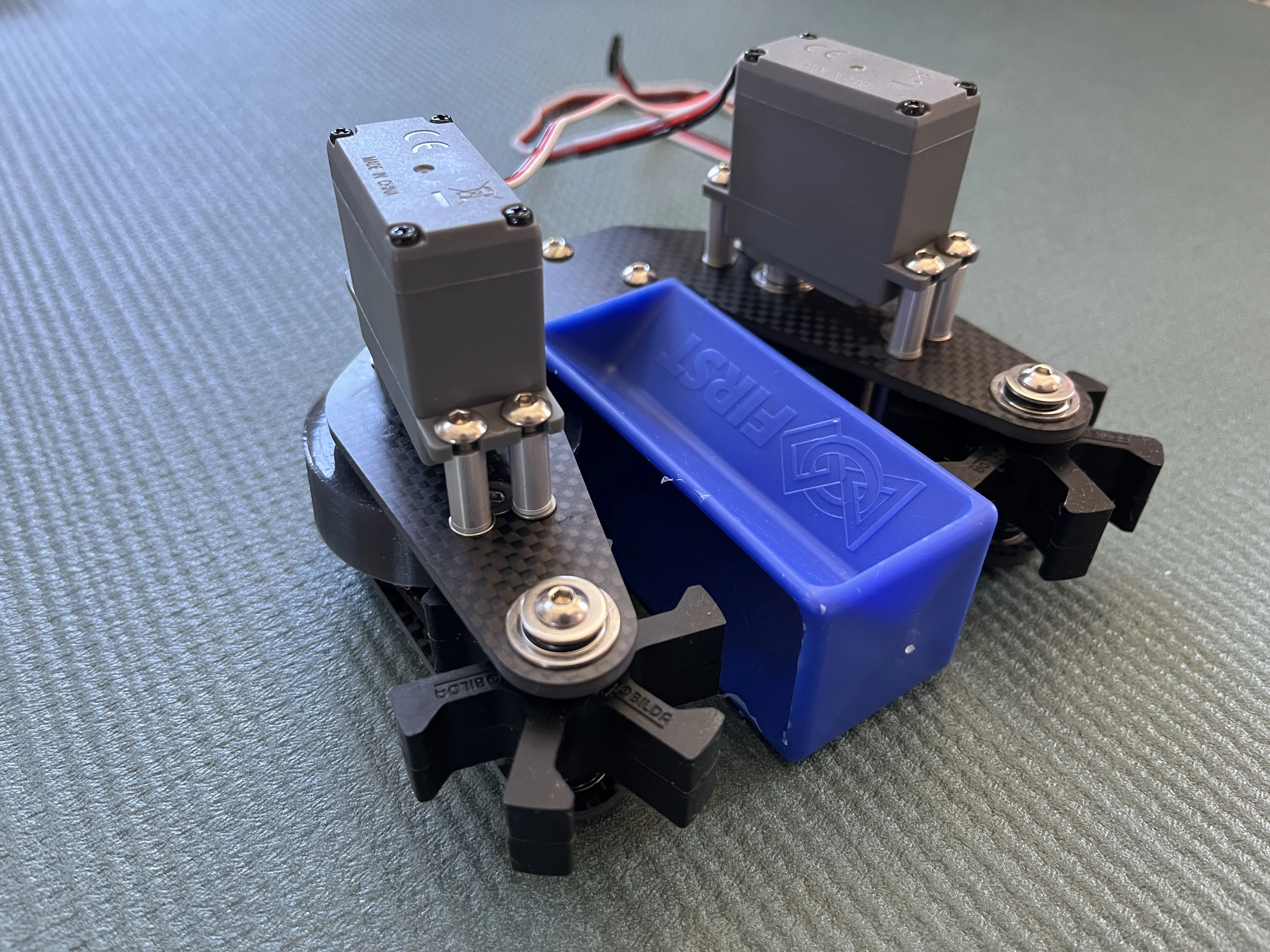
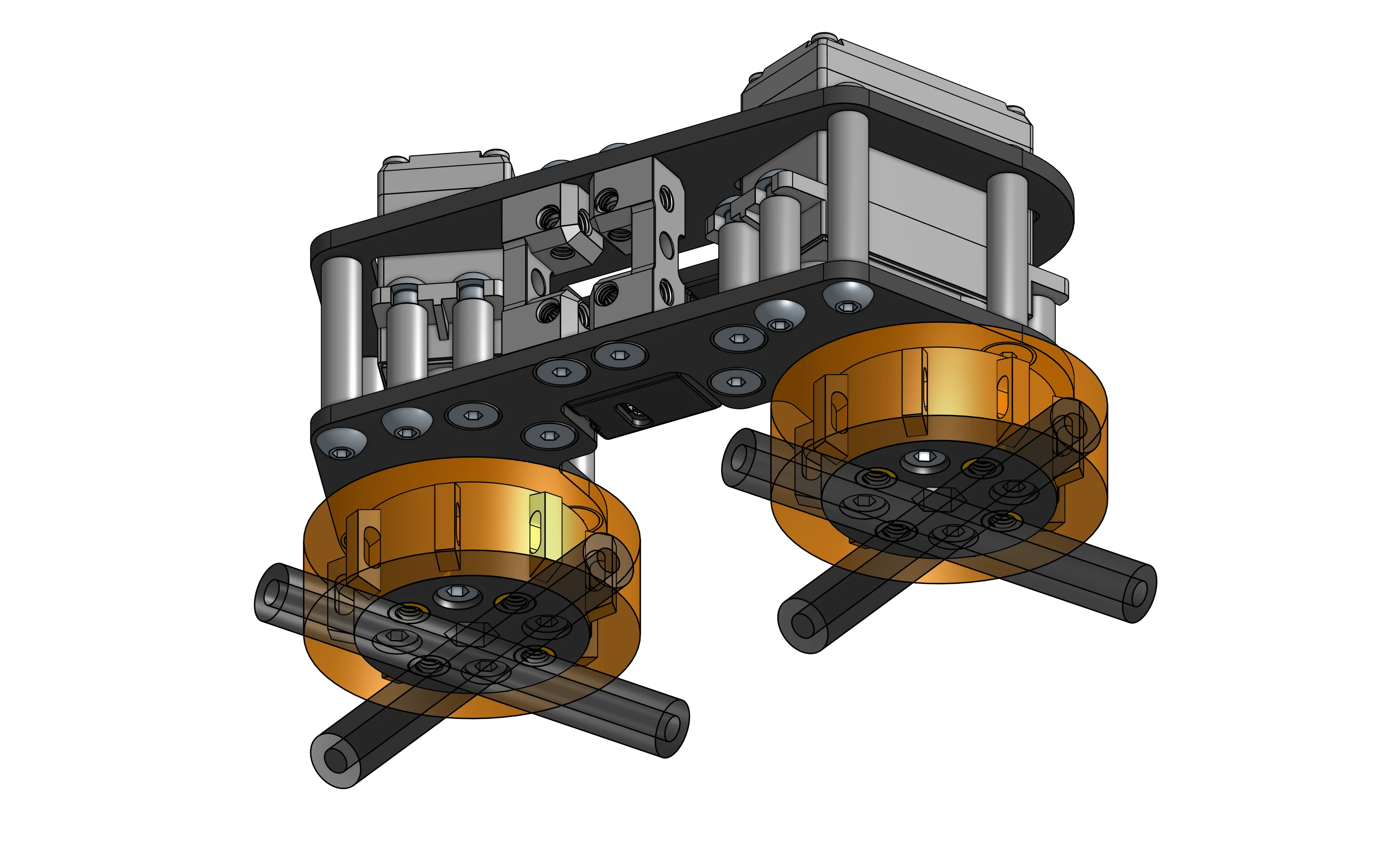
Claw Iteration
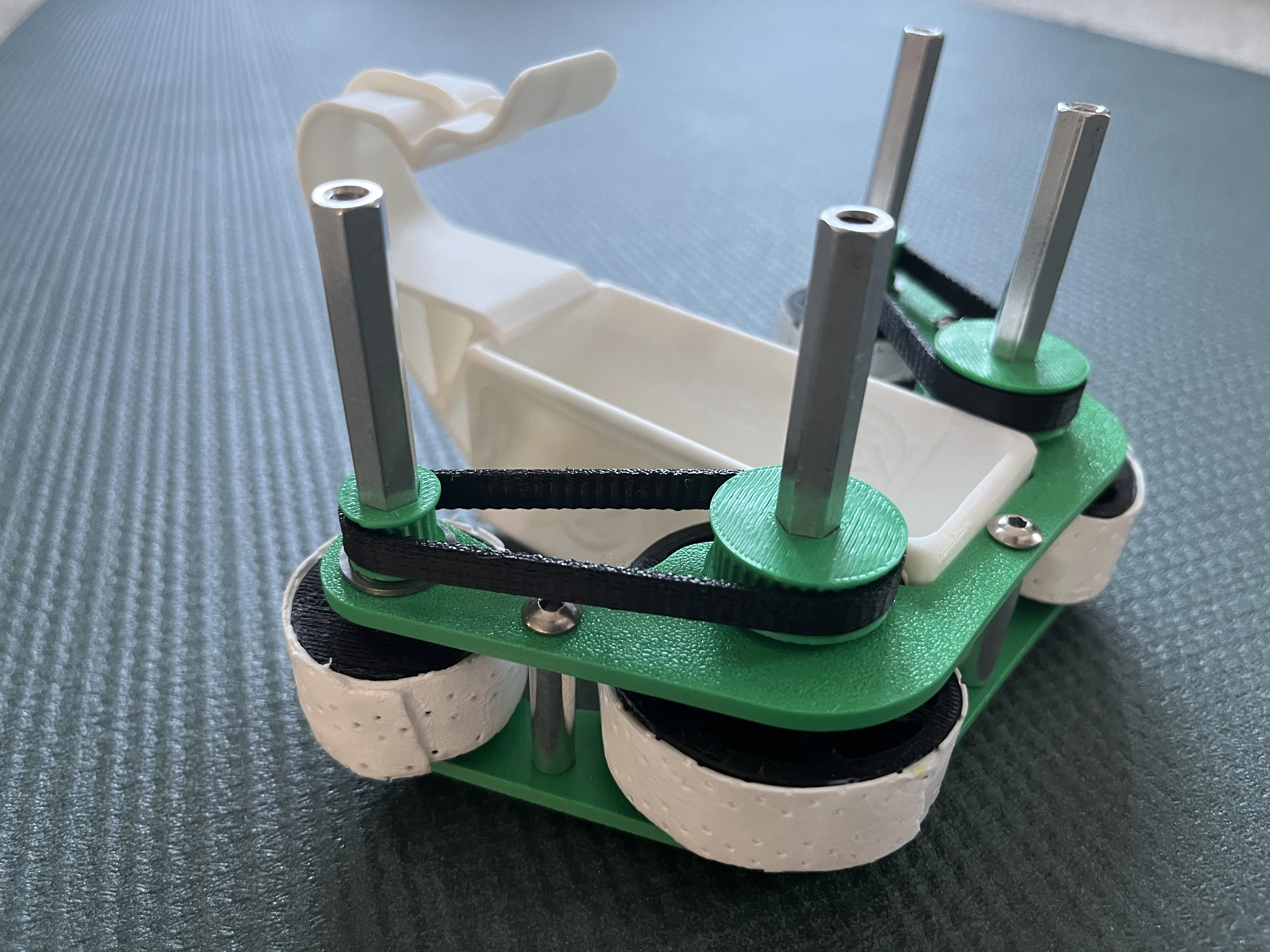

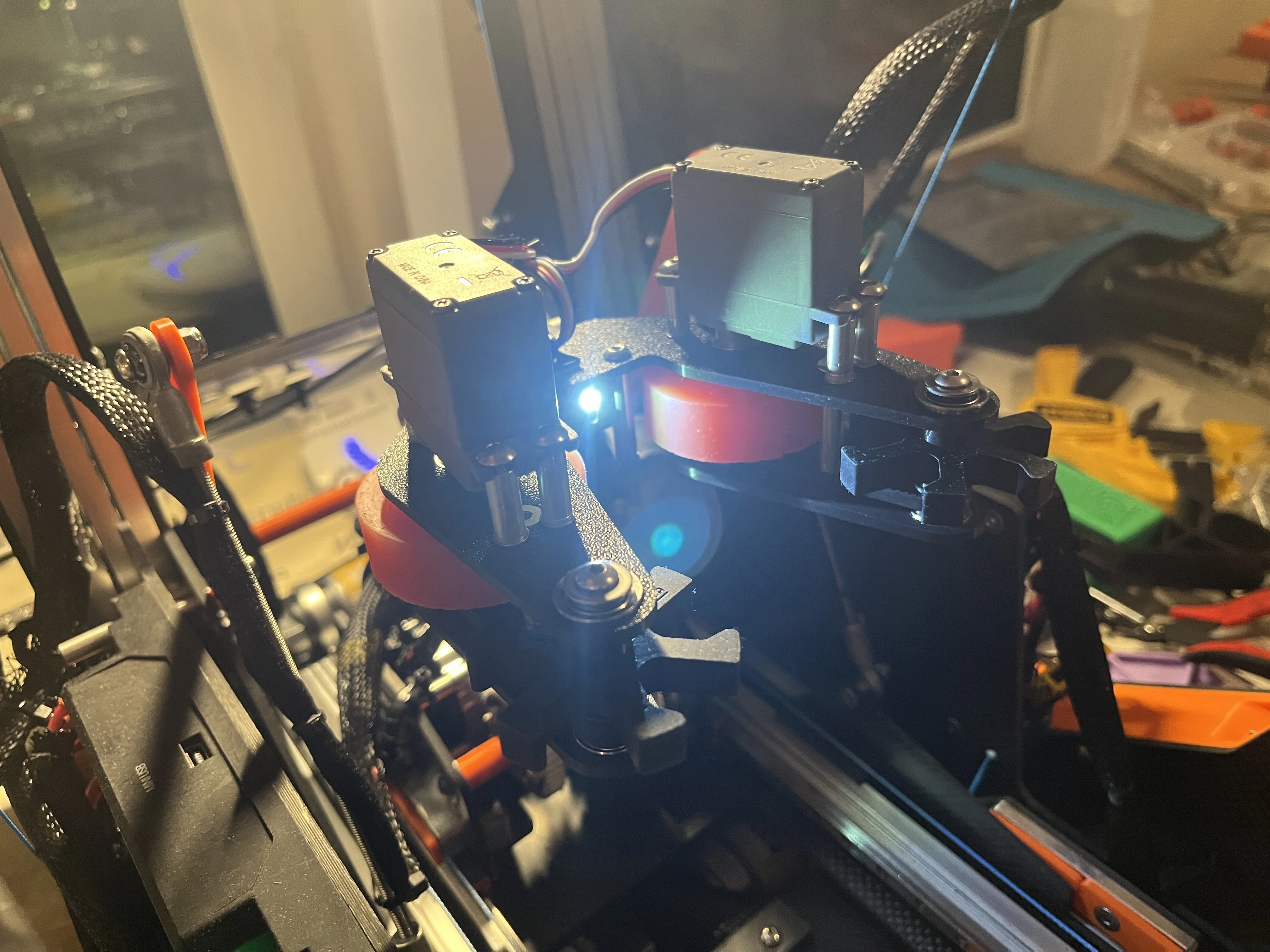
Claw - Version 3.1 (MTI)
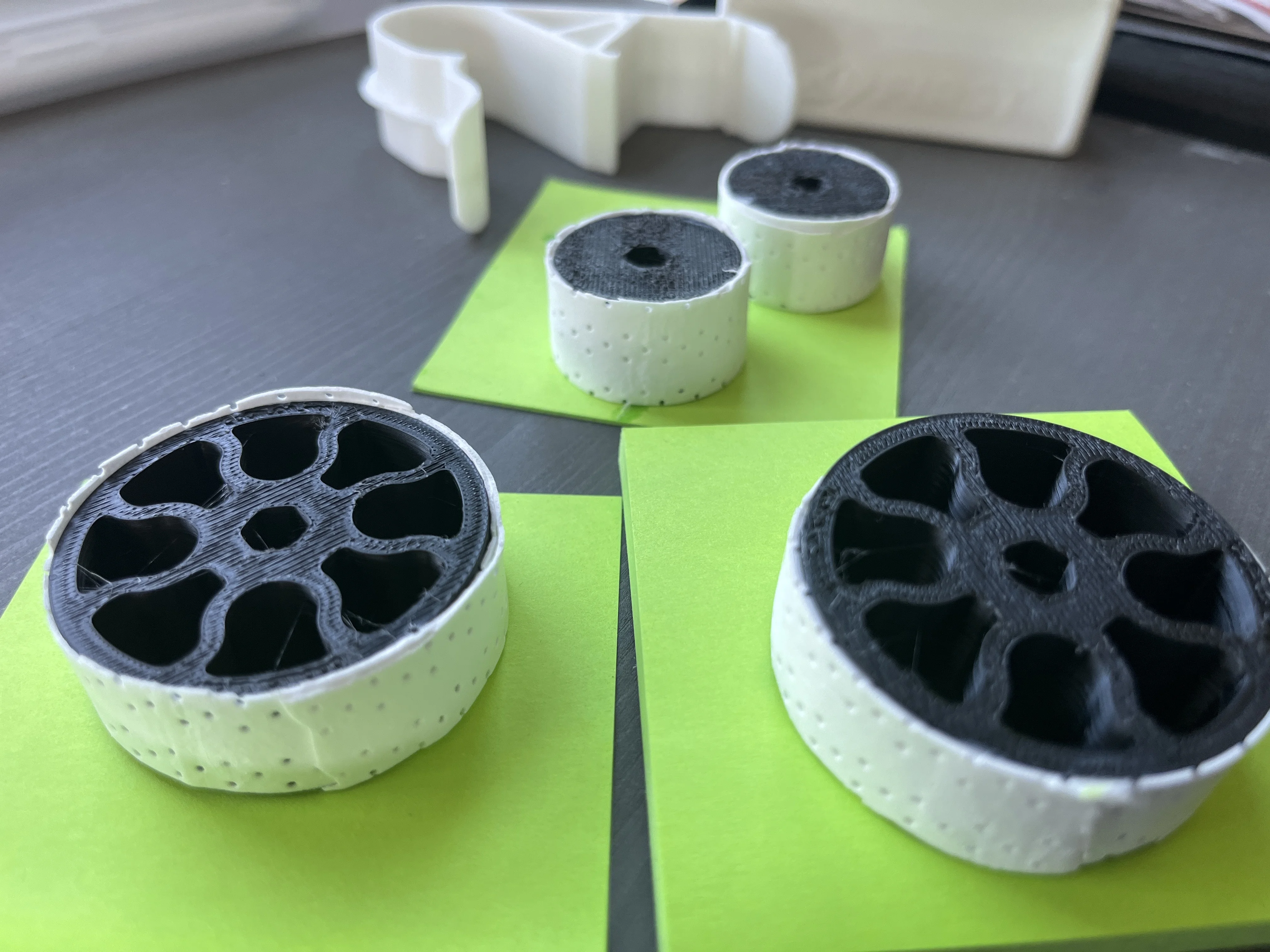
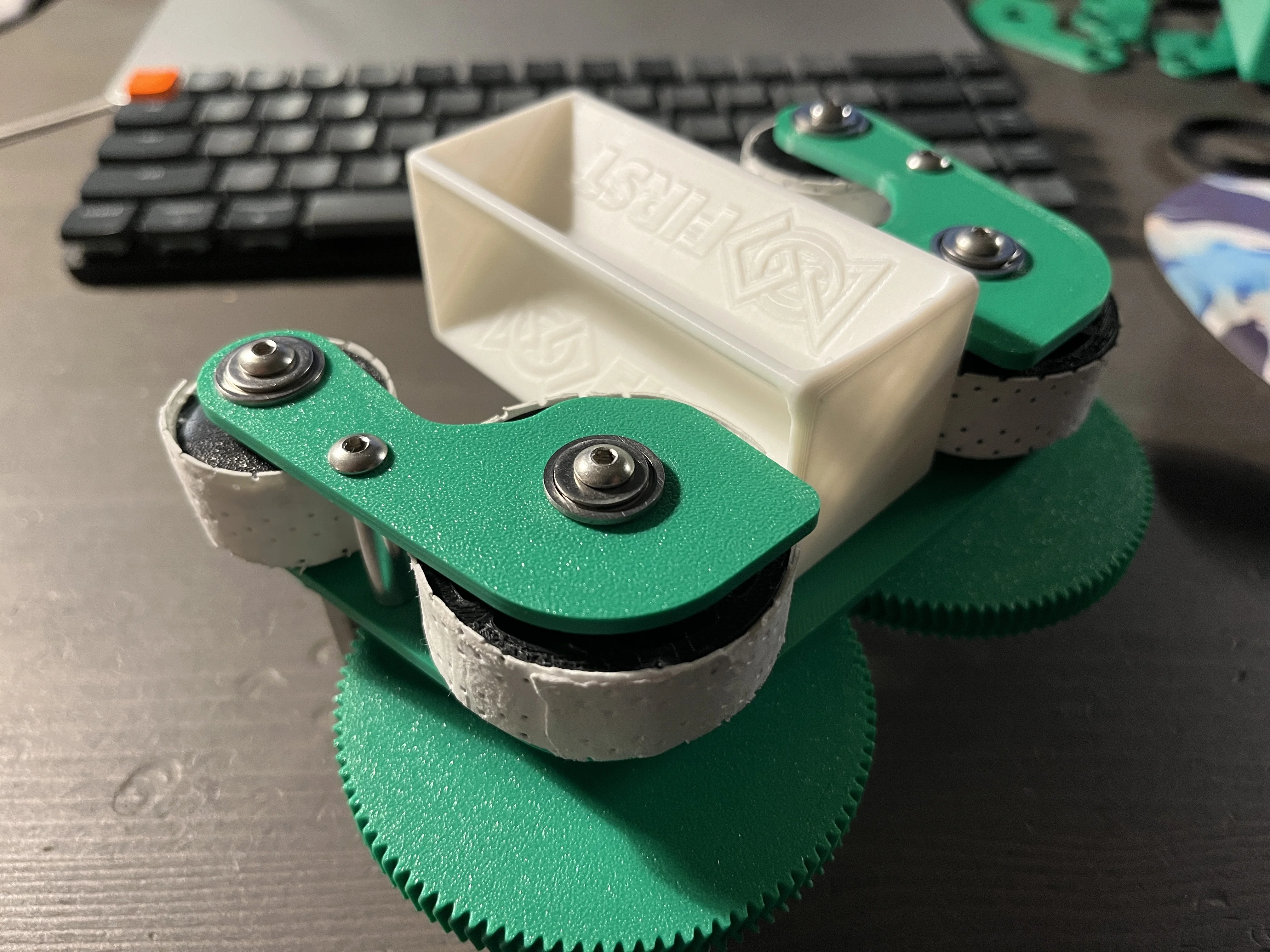
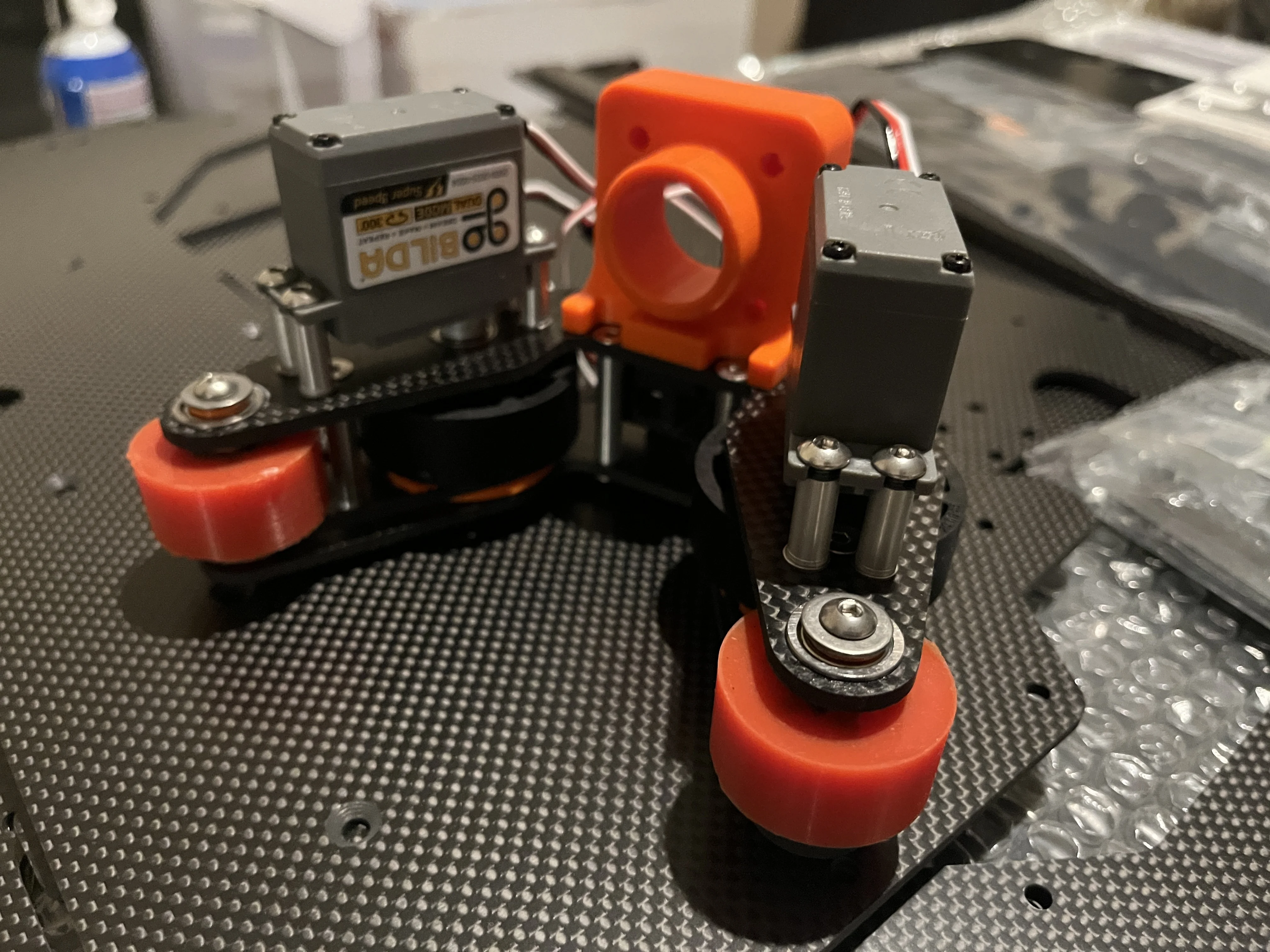
Neptune’s claw was the most iterated subsystem on the entire robot. I initially decided on an active intake from the start, prioritizing the robustness and speed it delivers. However, a traditional surgical tubing setup with a bare motor wasn’t possible due to weight and space constraints. This immediately led me to design and prototype a wheel/roller-based intake.
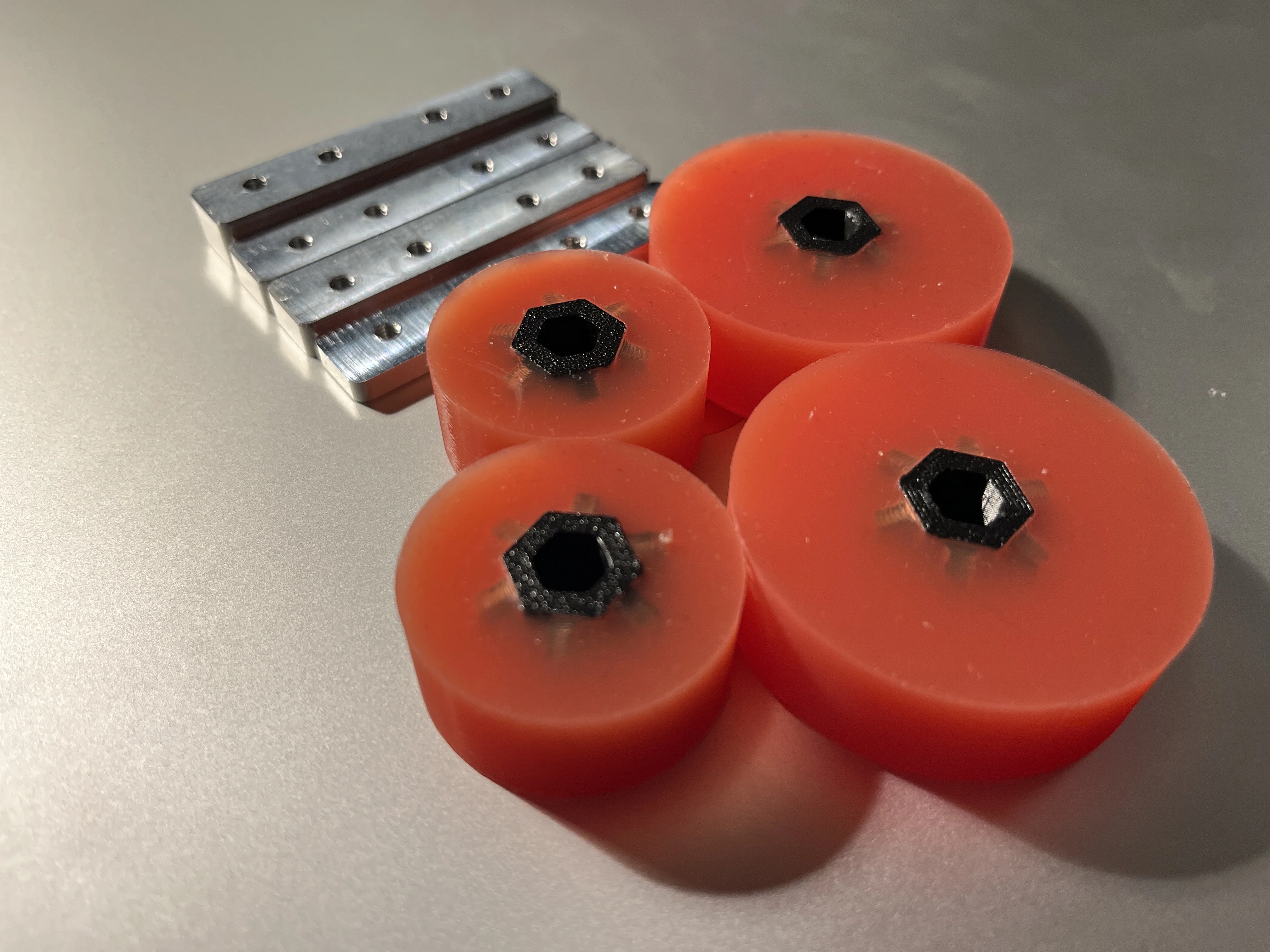
Critically, this claw had to handle both intake and deposit functions, as Neptune had no separate deposit mechanism. This dual-purpose requirement made it necessary to mold custom silicone wheels (15A)—they were firm yet compliant and incredibly grippy (thanks to Seb for the inspiration). Prototyping the compression between these custom wheels provided the perfect balance of grip for both intake and scoring.
For the Maryland Tech Invitational, I went full circle back to one of my first prototypes and adopted a “passthrough” style claw. This design allowed the claw to spit out unwanted colors through the back instead of having to reverse the servos every time a bad color was intaked, drastically decreasing cycle times.
Autonomous
I wrote Neptune’s two autonomous programs in Java using Roadrunner, an open-source path planning library. The programs were simulated prior to being tuned and deployed for competition. Read the full autonomous code here.
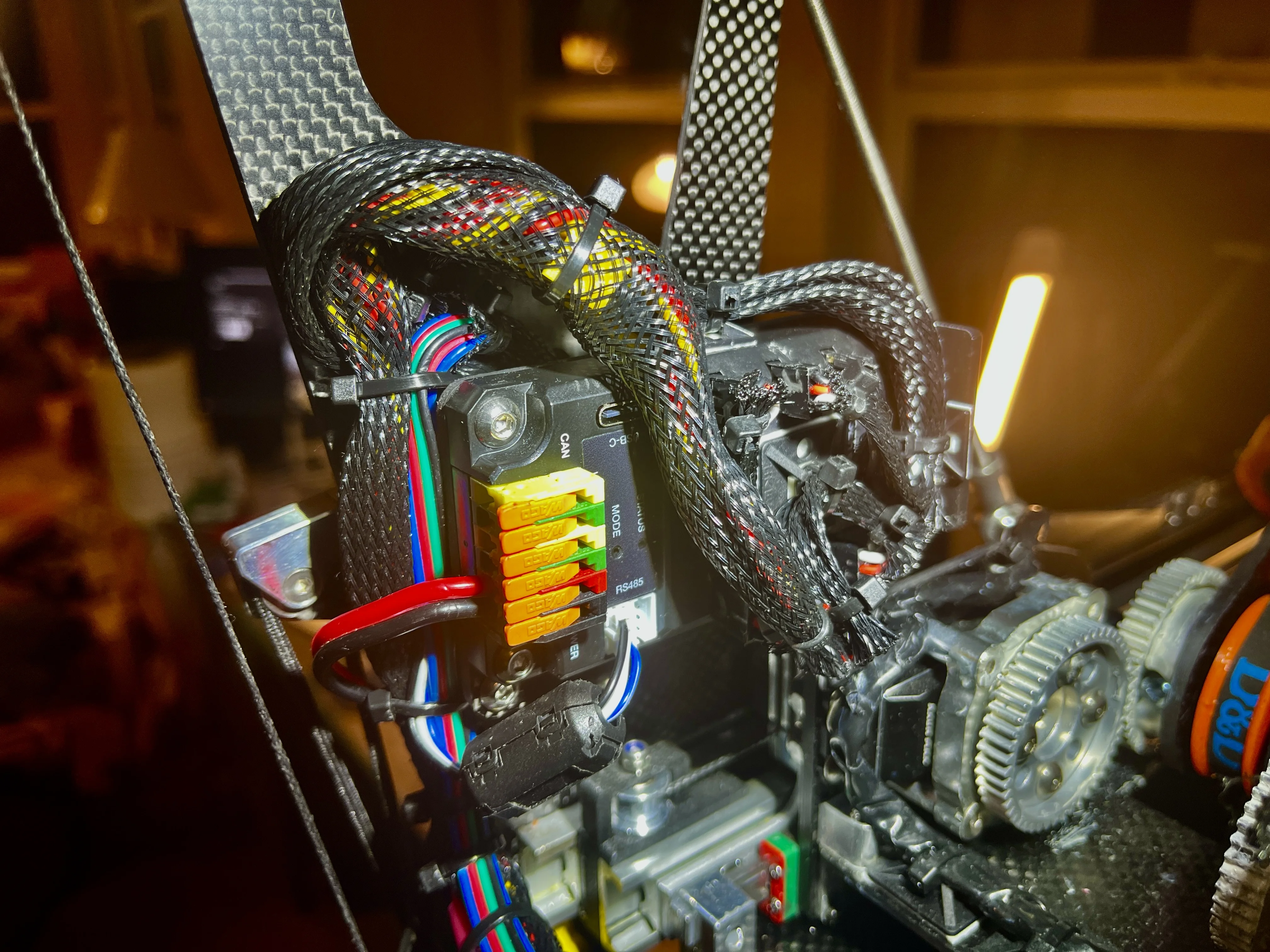
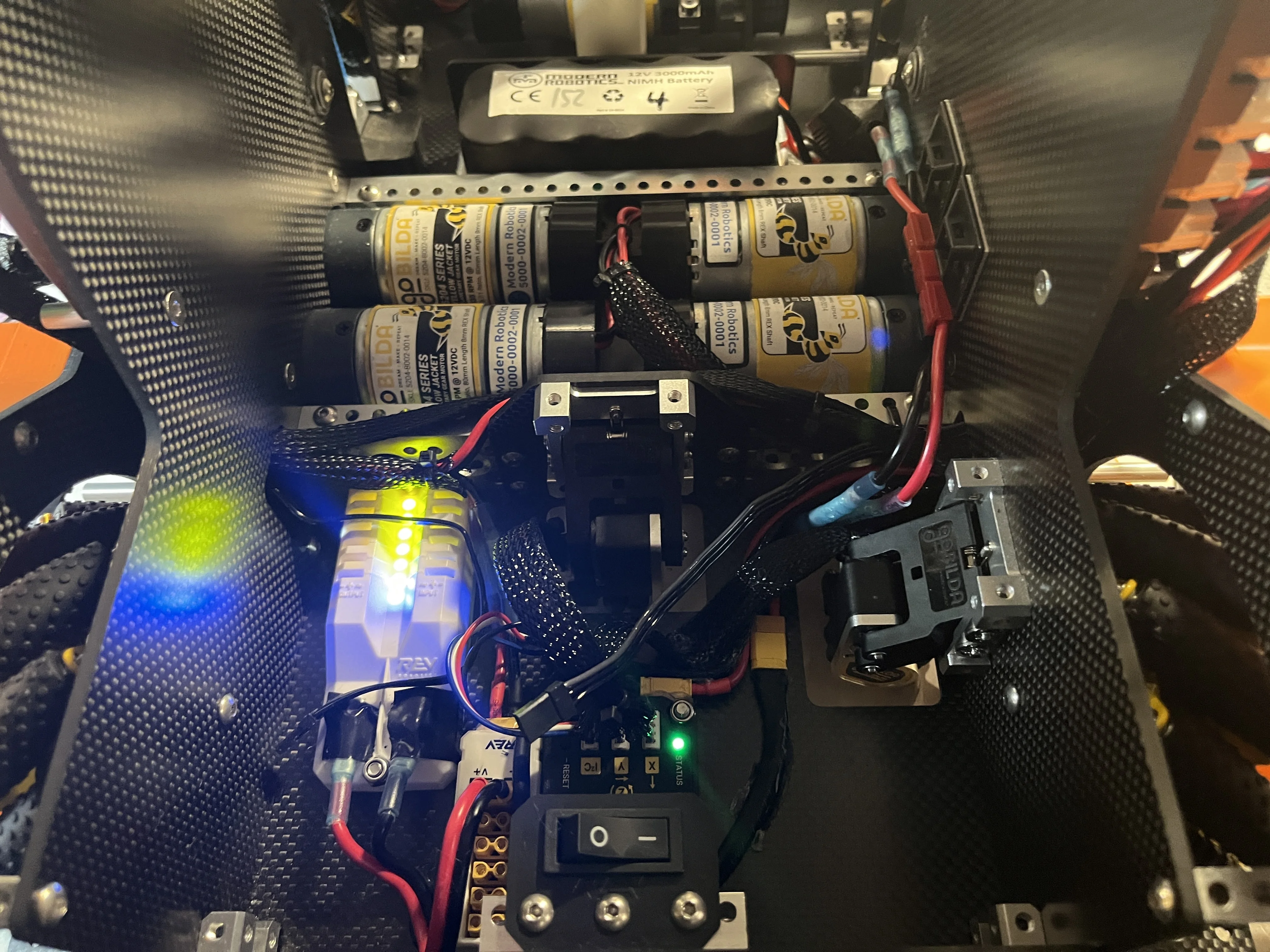
Electrical
Gallery





Check out Neptune’s CAD here!