Redemption

Overview
Redemption(v1) and Redemption(v2) were the third and fourth robots I designed and assembled on Team Juice 16236. V2 was a massive simplification of v1, with over 100 parts removed in the iteration from v1 to v2.
Every part on v1 was simplified and redesigned for robustness and reliability on v2, a major change that proved highly successful in the competitions it competed at.
Redemption(v1) led Team Juice 16236 to become the Finalist Alliance at the 2023 Roseville Qualifying Tournament.
Redemption(v2) led Team Juice 16236 to the following:
- #9 finish in the world out of 6,000+ teams
- Finalist Alliance Captain of the Franklin Division at the 2023 FIRST World Championship
- Winning Alliance at the 2023 NorCal Regional Championship
- Winning Alliance of the Gold Division at the 2023 NorCal Regional Championship
- Design Award at the 2023 NorCal Championship
v1
v2
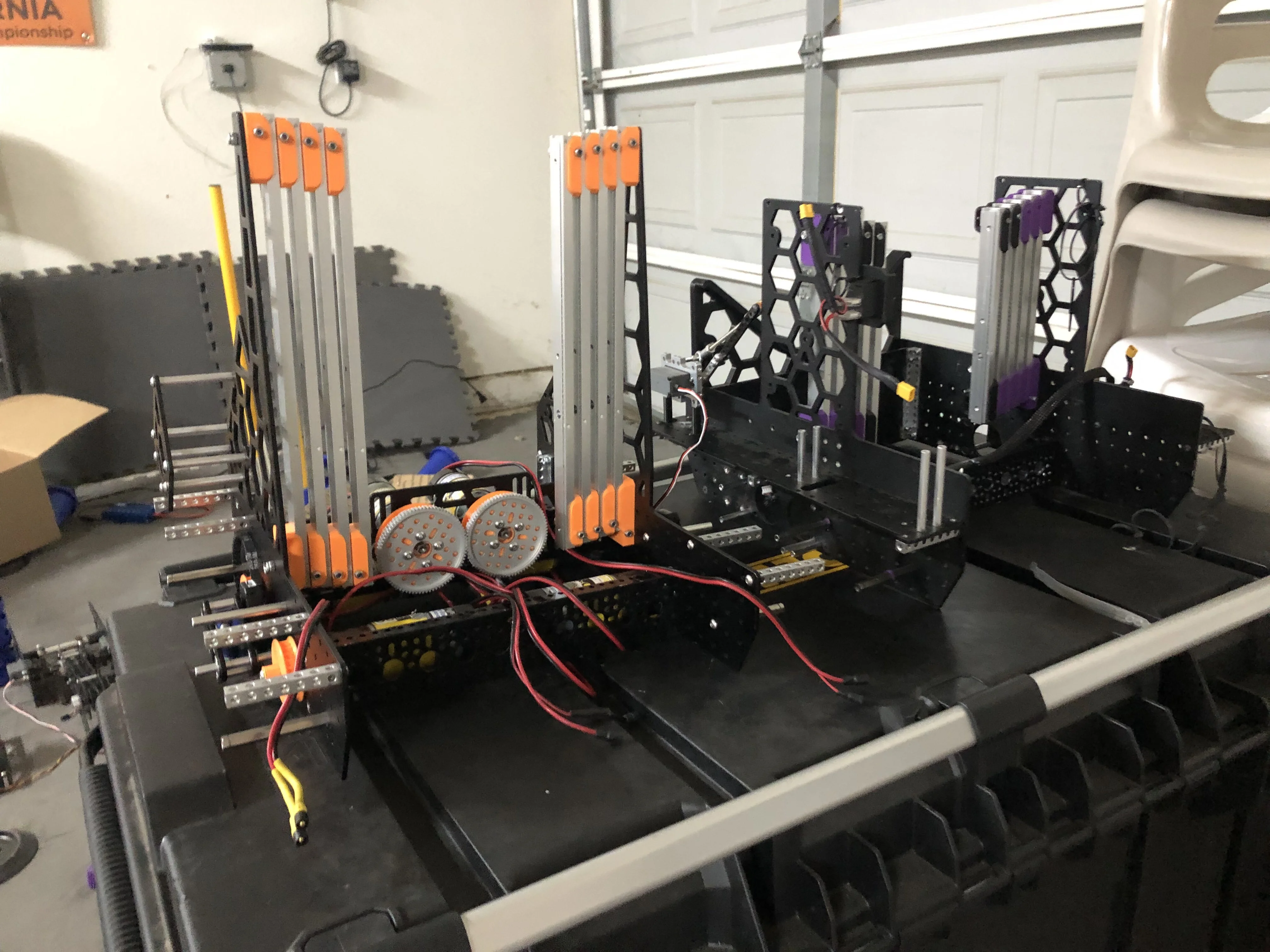
Version 1 (left) vs. Version 2 (right)
Belted Linear Slides
Version 1 (left) vs. Version 2 (right)
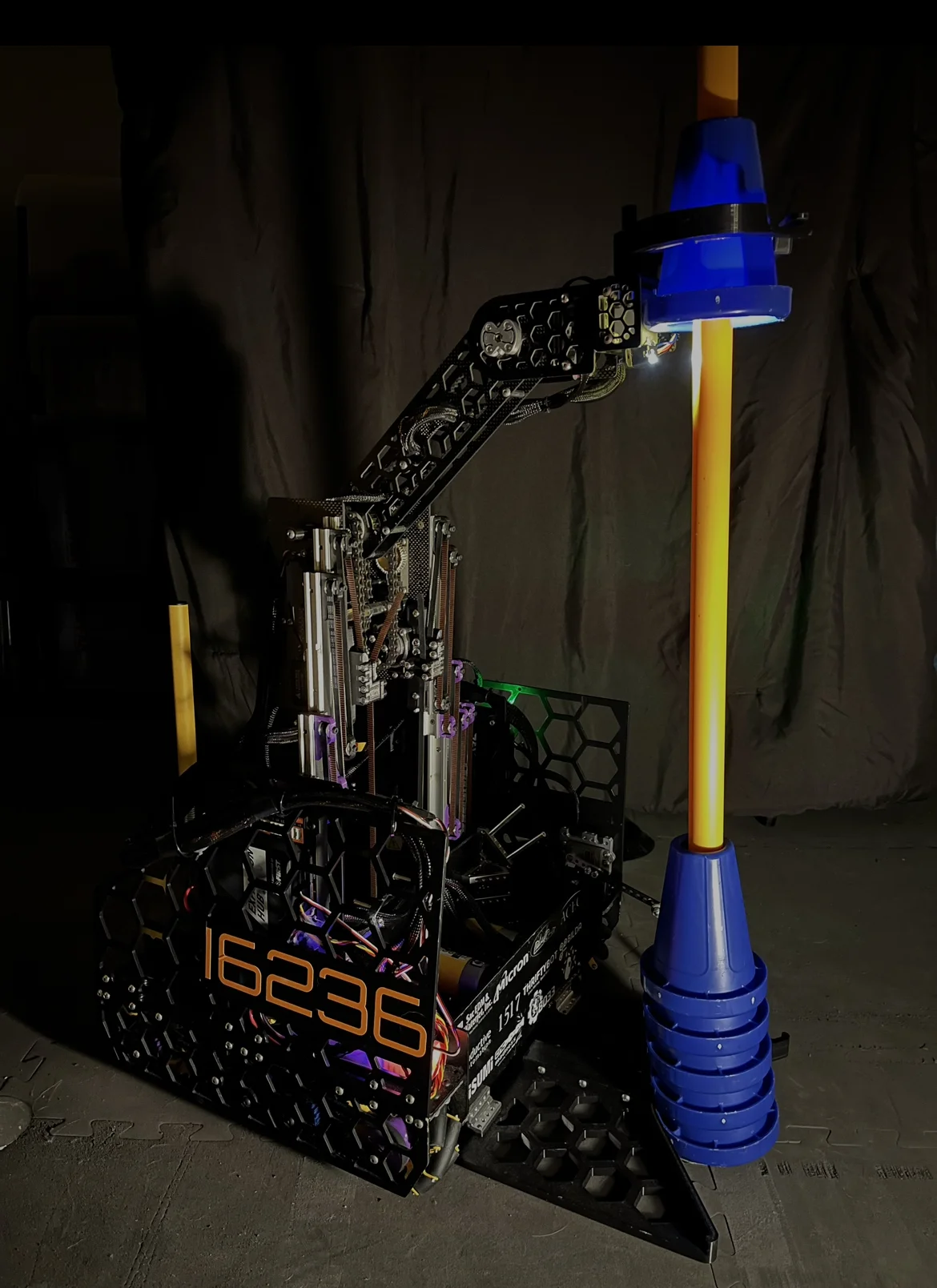
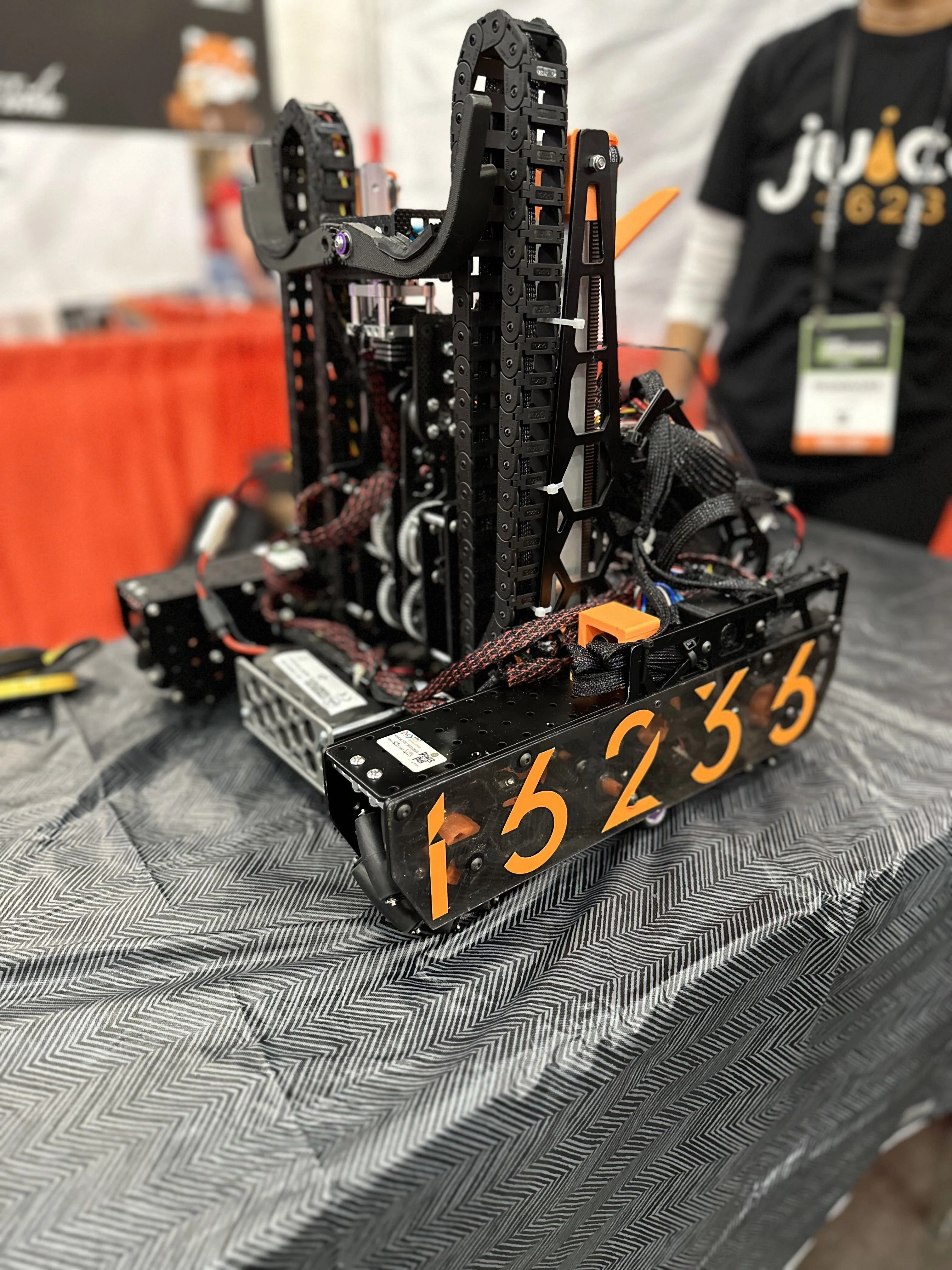
At Redemption’s core are its belted linear slides, rigged continuously in order to achieve the necessary vertical extension to score the cones. The belted linear slides proved to be both more durable and easier to maintain compared to traditional strung slides used by many FTC teams, re-emphasizing my focus on maximizing reliability and durability.
Iterations
v1

v2
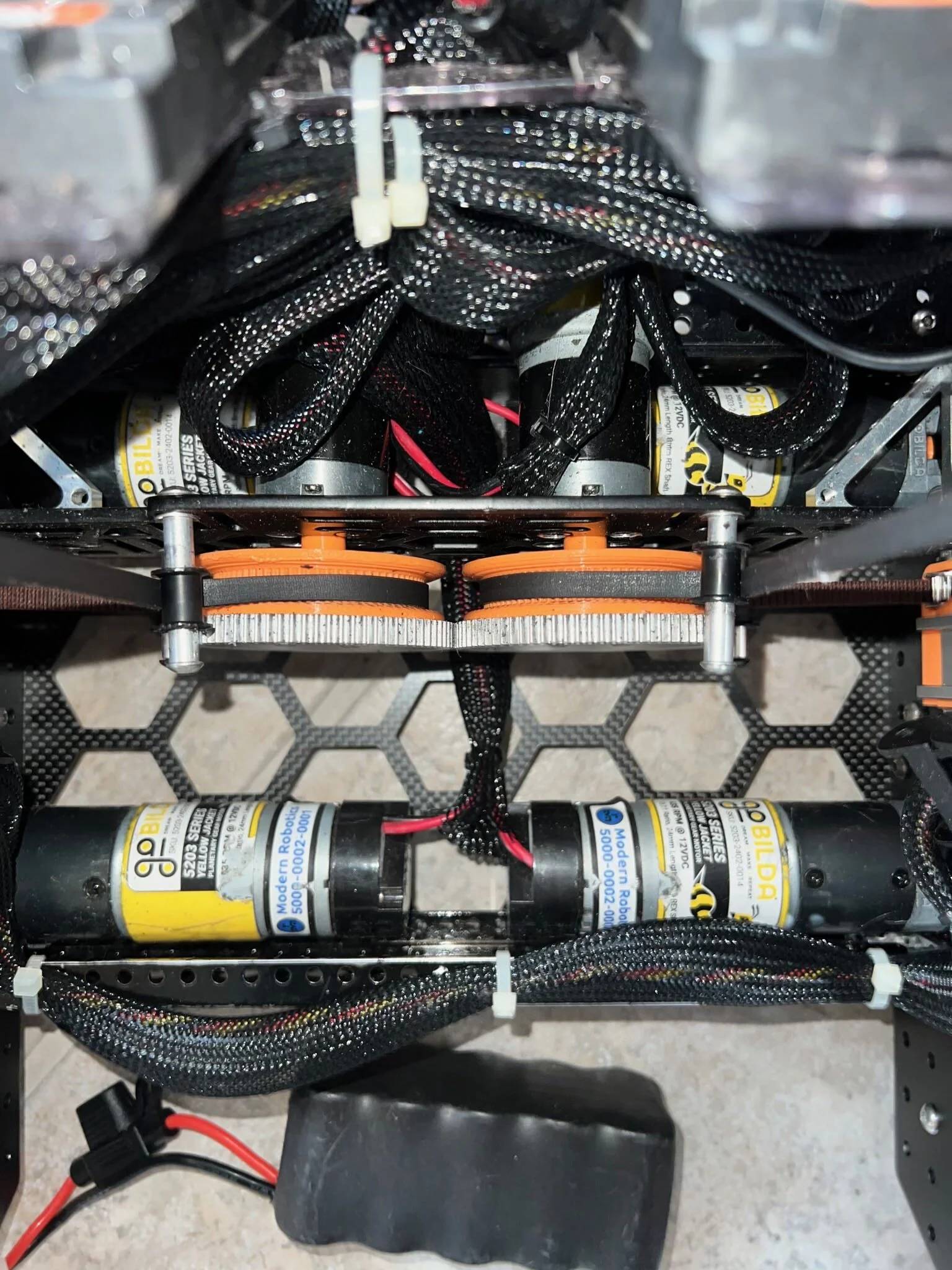
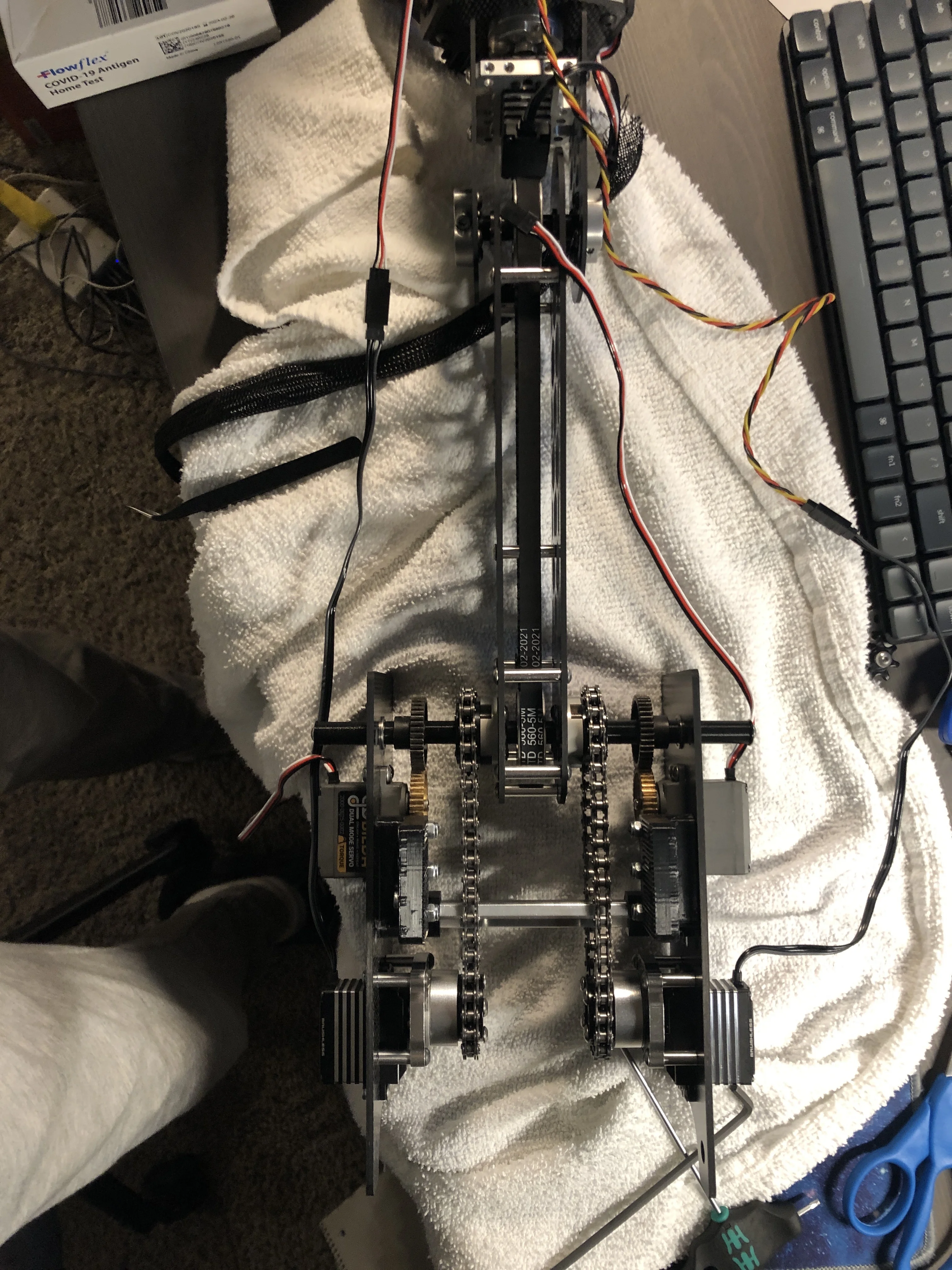
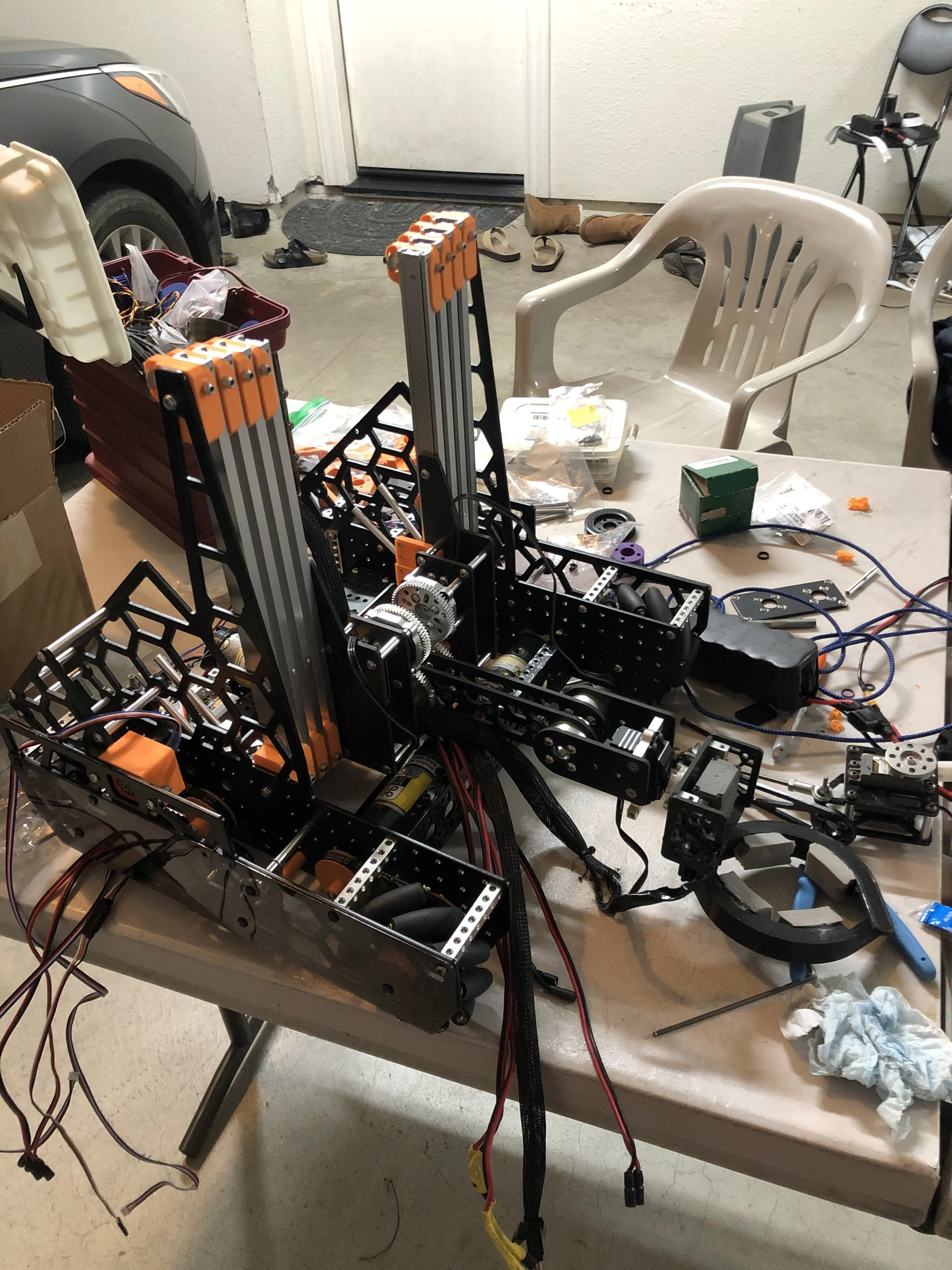
The belted slides used GT2 belt (similar to what is found on 3D printers). However, the high tension required to prevent skipping led to excess friction on v2, as unsupported delrin idlers were routing the belt up to the clamp on the carriage. These idlers also caused some deformation to the motor plate.
A subsequent change on v2 fixed this. Bearings replaced the delrin idlers and a 304 stainless steel plate was added to reinforce the 6061 motor plate and ensure alignment.
This iteration led to the lift speed increasing by 1.5x.
Version 1 (top) vs. Version 2 (bottom)
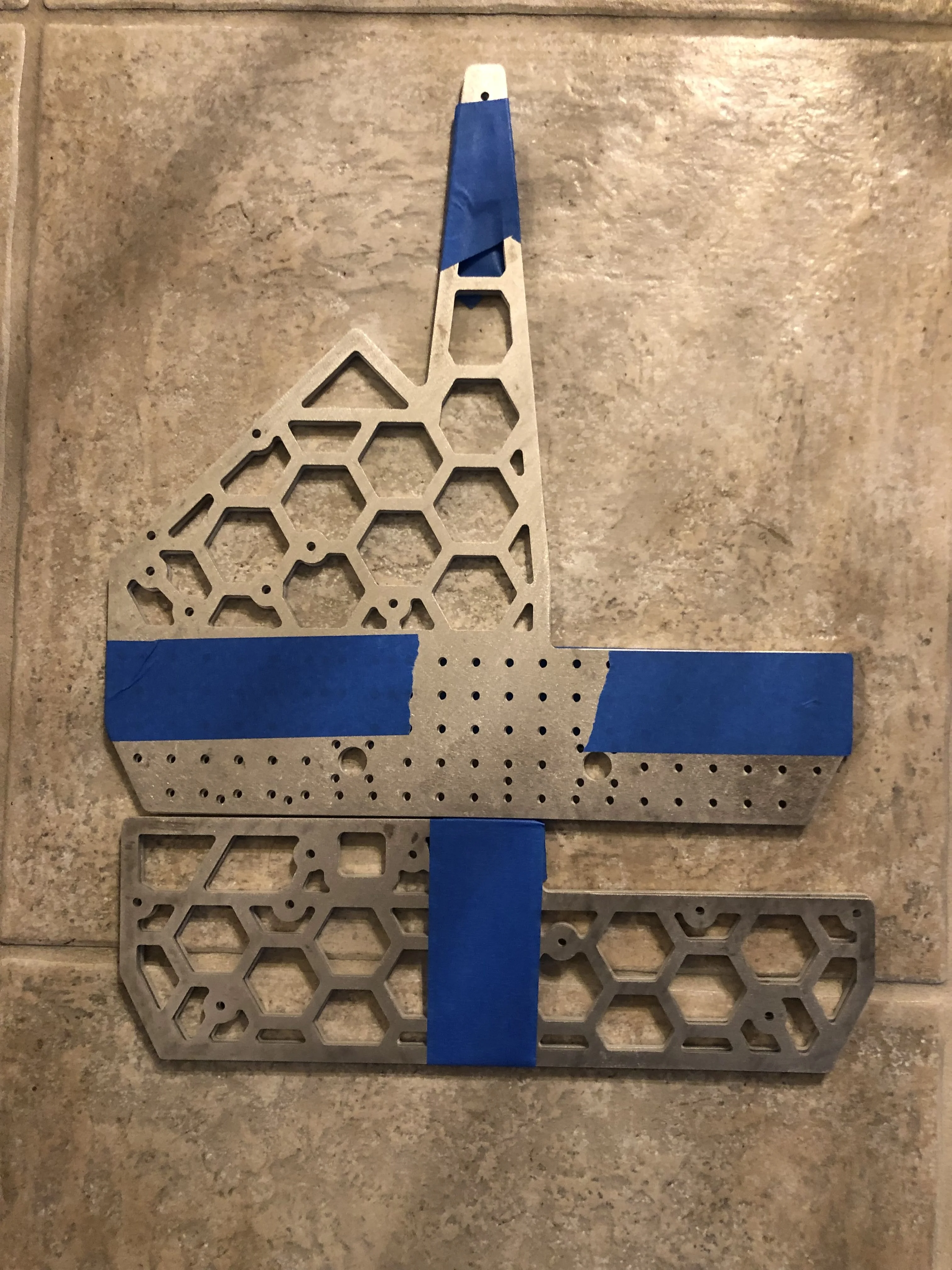
Version 2 (left) vs. Version 1 (right)
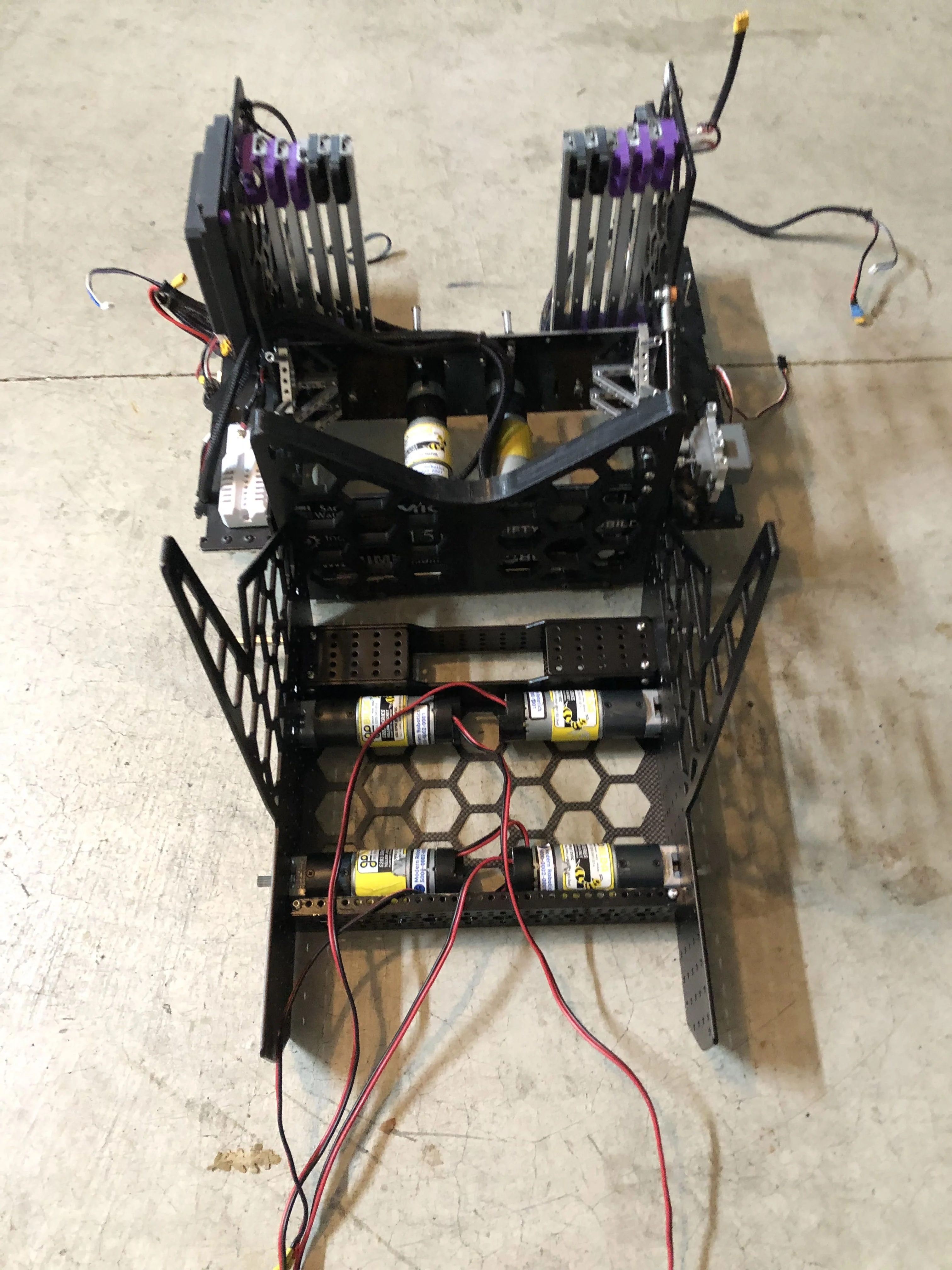
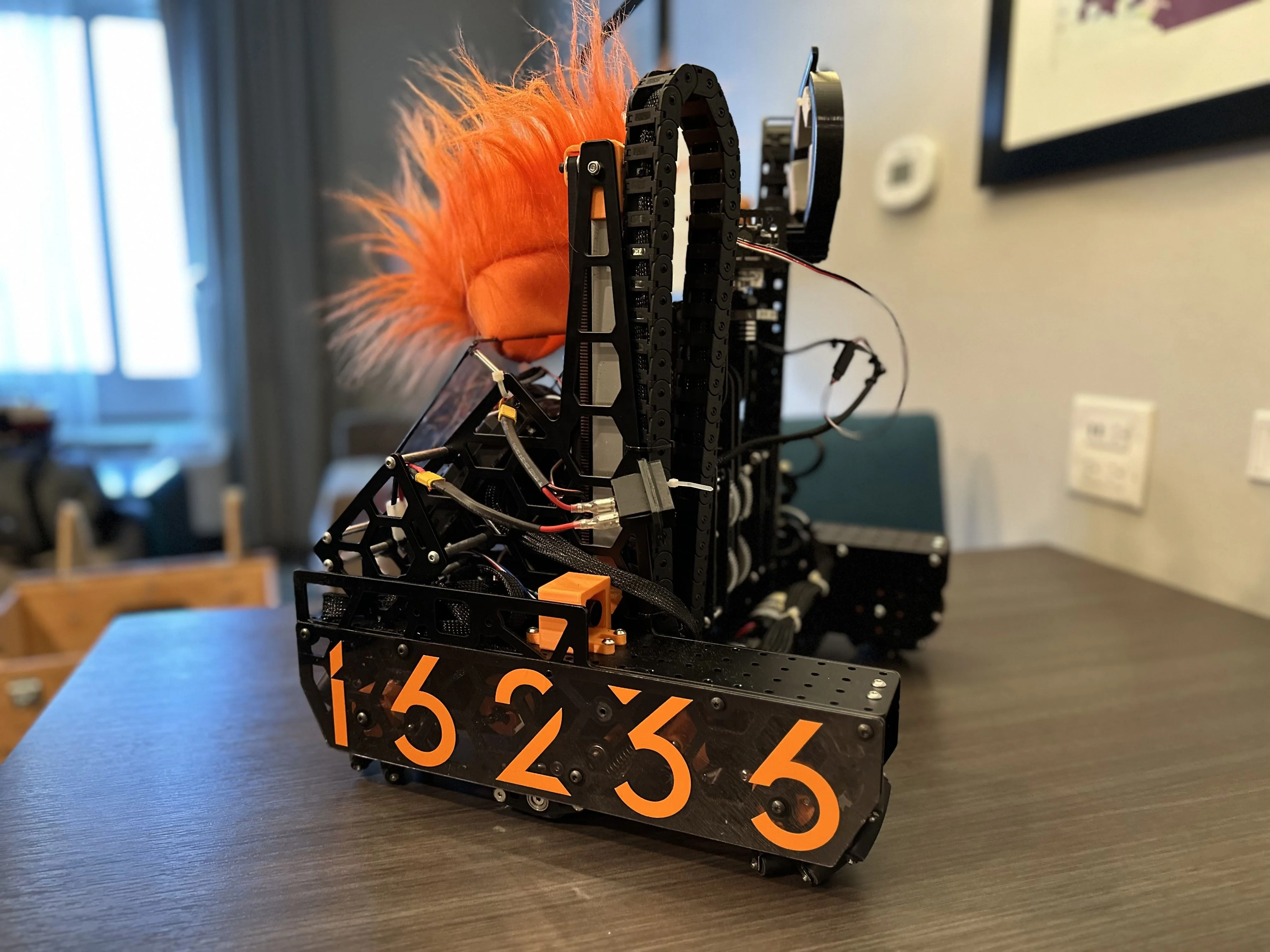
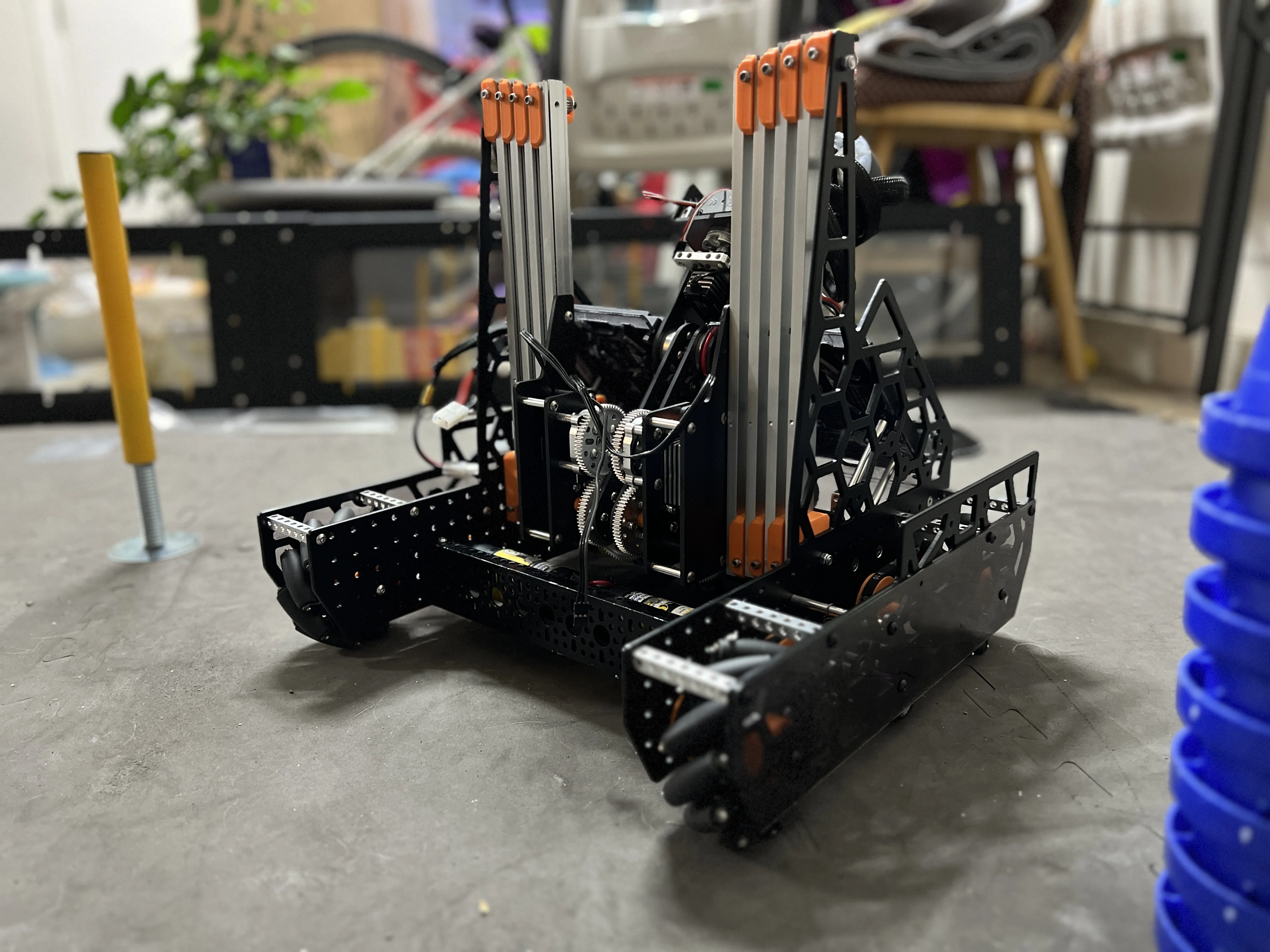
V2 underwent a major reduction in size and weight compared to v1, which was a fundamental component of the overall simplification.
Version 1 (left) vs. Version 2 (right)
V1 had issues with odometry tracking and the robot was even being lifted up by the force of the odometry pod itself. This was corrected on v2 with a new, all-metal pod design that was significantly more durable and had an improved springing setup.
v1

v2
V1, while pretty cool, was overcomplicated. The arm’s “wrist” was powered coaxially and through a belt that was nested within the arm. However, after re-evaluating the design, v2 was designed without this extra degree of freedom, significantly cutting down on the servos, the gearing for the coaxial setup, and the accompanying parts. This resulted in a much lighter and more robust system.
Distance Sensor Localization Math
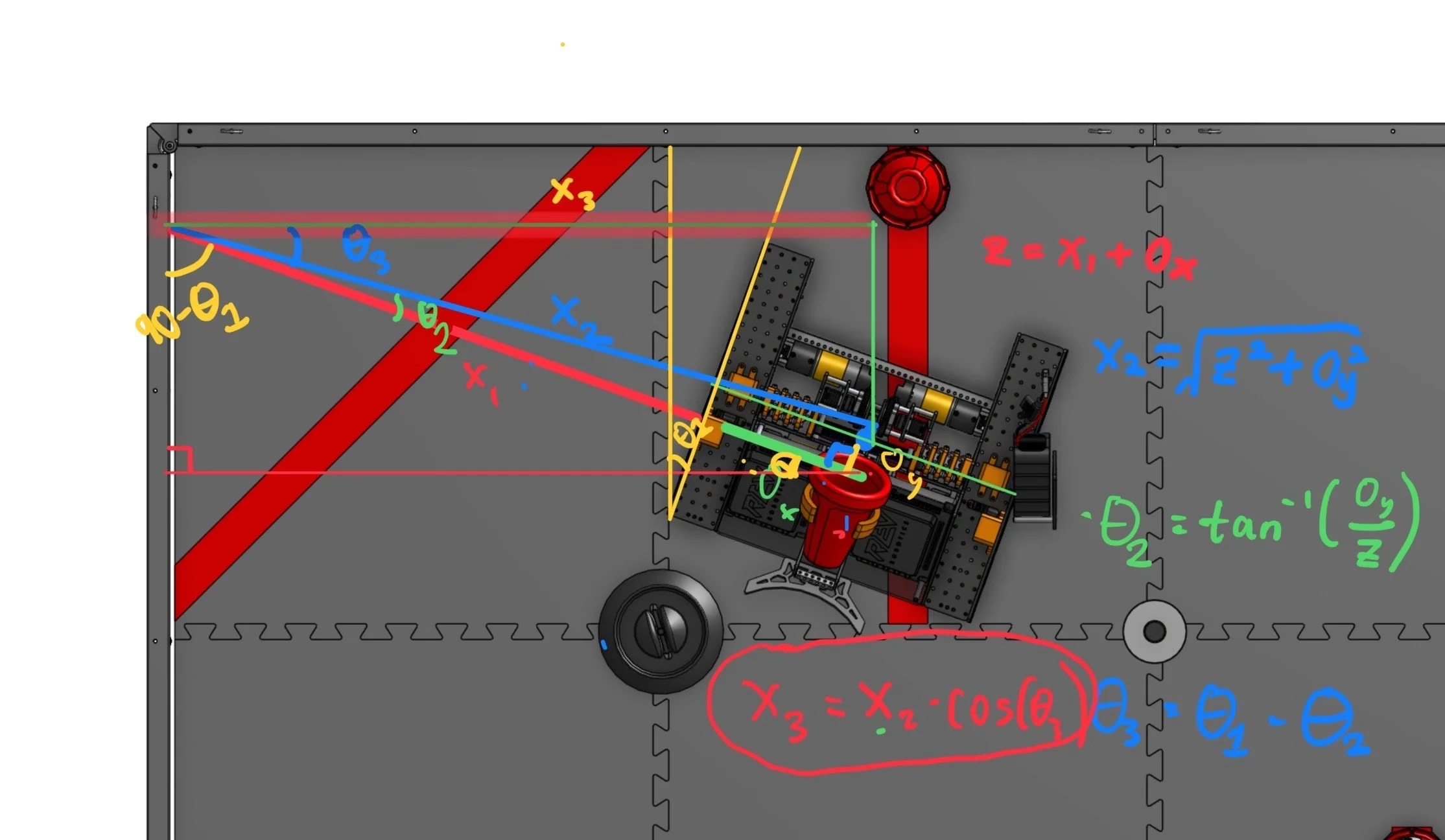
V2 had MaxBotix I2C ultrasonic distance sensors to localize its position in tandem with the odometry pods to cancel out any drift the pod wheels might introduce.
Gallery





Check out Redemption’s CAD here!